摘要:在MASS技术日渐成熟的背景下,越来越多的MASS开始投入航行试验和初步应用。影响MASS航行安全的因素突破了原有的海事规则体系框架,给海事管理带来了新挑战。为解决当前海事规则的适用问题,海上安全委员会已经在第109次会议上发布了最新的MASS规则草案,但仍有部分问题有待解决:在人为因素方面,需要为MASS的相关操作人员制定更高级别的培训管理规定,明确在不同操作模式下对船长的监管框架;在船舶因素方面,需要针对远程操作中心的驾驶台制定新的管理规范,在全球范围内构建一套适用于MASS的态势感知测评体系,进一步完善网络安全相关立法;在环境因素方面,需要通过完善港口设施保安规则来增强港口应对网络和物理威胁的能力,升级船舶交通服务的软硬件设备,加强人员培训,增强为MASS提供交通服务的能力。
关键词:海上自主水面船舶;海事规则;航行安全;人为因素;船舶因素;环境因素
一、引言
海上交通安全与人民群众的人身和财产安全密不可分,与海上交通运输事业的发展息息相关。2021年交通运输部海事局印发了《海事系统“十四五”发展规划》,将保障水上交通安全列为规划的第一个主要任务,提出要加强对海上运输主体的安全管理,深化研究基础性的船舶安全技术,专项整治水上交通安全。当前,海上自主水面船舶 ( Maritime Autonomous Surface Ships,MASS ) 的有关科学与商业研究持续推进,远程控制系统、自动驾驶系统和智能避碰系统等关键技术不断发展。增强国际海事规则对MASS的适用性,加强各方主体对MASS航行安全的风险管控,保证MASS航行安全,有助于推动MASS进一步投入生产实践。
为解决国际海事规则对MASS的适用问题,国际海事组织 ( IMO ) 对现有海事规则的适用性进行了评估并制定了MASS规则。2021年,海上安全委员会 ( MSC ) 第104次会议报告中提出,要制定初步的非强制性MASS规则,以形成强制性规则为最终目标,优先考虑自主程度较低的船舶(1)。2022年,MSC第105次会议通过了基于目标的MASS规则制定路线图,组建了海上安全委员会/法律委员会/便利运输委员会联合工作组 ( JWG ),就MASS规则的制定成立通信组(2)。2022年,MSC第106次会议审议了通信组制定的MASS规则框架草案,提出MASS规则的制定应当着眼于目标和功能要求,使其成为现有文书的补充规则(3)。其后的MSC第107次、第108次会议相继对完善中的MASS规则草案进行了审议。2024年9月,MSC闭会期间MASS规则工作组召开了第三次会议,完成了对MASS规则草案中“航行安全”“防火、探火和灭火”“搜救”“应急响应”四章的讨论。MSC第109次会议提出,非强制性的MASS规则将于2026年5月的MSC第111次会议得到确定并通过,基于非强制性MASS规则制定的强制性规则将最晚于2030年7月通过(4)。作为现有公约和相关立法的补充,MASS规则采用了Goal-Based Standards ( GBS )(5)原则,基于《制定IMO目标导向标准的一般指南》(6)和《起草IMO文书时应考虑的原则》(7)制定,仅包含目标和功能要求,需要出台更多配套的法律法规和实施细则。当前国际上对MASS规则的研究更加注重功能,研究对象聚焦于货船,同时考虑到在今后为货船制定的规则可以适用于具有相同功能的客船。(8)因此,本文主要探讨的是用于海上货物运输的自主操作和远程控制海船,排除用于军事的、政府公务的船舶。
为使人和机器在科技应用中有机结合,发挥更大效能,“人-机-环境”工程学应运而生。海上船舶航行也可看作“人-机-环境”系统在海上交通运输领域的特殊运用,因此,影响MASS航行安全的要素通常可以总结为人、船舶与交通环境三个方面。在这三个要素中,人是操纵船舶的关键因素,船舶是保证航行安全的内部条件,交通环境是影响航行安全的外部条件[1]。
二、IMO框架下规制MASS航行安全人为因素的规则适用性
当前学界普遍认为,影响传统船舶航行安全的人为因素包括船员的责任心和思想重视程度、专业技能和经验水平、身体素质和心理状态以及面对船舶航行中突发情况的应急处理水平。[2]MASS是信息技术和人工智能技术高度发展的产物,是人与计算机的紧密结合。因此在考虑影响MASS航行安全的人为因素时不能仅仅局限于人为因素本身,还应分析整个船舶的人机协作问题。对MASS而言,人为因素的主体范围从传统的船长、船员拓展到了船公司、MASS船员、远程操作中心 ( Remote Operations Control Center,ROC ) 的操作员、船舶监管机构和其他相关机构。在MSC初步形成的MASS规则草案中,人为因素被定义为船舶自主系统和参与MASS操作管理人员之间的相互作用。人为因素包括认知工作量、态势感知、通信协议、团队合作、决策过程、操作人员的培训要求以及确保在MASS设计和操作中充分考虑这些因素的指导方针和最佳实践(8)。
MASS规则草案将船员分为两类:一类是MASS的船上船员,指在MASS之上的船长、其他高级船员和操作人员;另一类为MASS的远程船员,指远程船长、远程操作员以及负责远程控制MASS操作和为MASS操作中的船员提供援助的责任人。船长也被区分为船上船长和远程船长,无论以何种形式,MASS都必须配备一名船长;不论操作模式如何,MASS的船长都应具备在必要时进行干预的能力。ROC人员是指在ROC受雇或负责操作MASS的人员,其对MASS的操作主要包括监督和控制两方面,但具体的远程操作的内涵及其所涉及的各项操作内容还有待定义。MASS规则草案中提出,MASS需要配备国际安全管理系统,其中应包括MASS和ROC的所有操作程序。以下将详细讨论IMO的相关规则对人为因素中船员配备、船员适任和船长责任转移这三个重点问题的适用。
( 一 ) 船员配备——明确MASS最低安全配员标准
传统的最低安全配员标准将不再适用于MASS,MASS的船上配员可以为零。1974年《国际海上人命安全公约》 ( International Convention for Safety of Life at Sea,下称SOLAS 公约 ) 于第V章“航行安全”中明确,各船舶应当从保证海上人命安全的角度出发,配备足够数量和足以胜任的船员。IMO《最低安全配员原则》( A.1047 ( 27 ) 决议 ) 进一步对最低安全配员作出了规定。在确定船舶的最低安全配员时,应当使其满足《最低安全配员原则》中规定的船舶/船员整体上能够执行某些任务的能力 ( capability ) 和应当具有的某些技能 ( ability )。《最低安全配员原则》附件2中提出了确定最低安全配员时应当考虑的相关因素,其中就包括船舶的自动化程度和公司提供的岸基支持程度。在MASS航行的过程中,原先需要船员执行的任务分别通过远程操作系统被ROC替代、通过自主操作系统被船舶替代。因此,对MASS最低安全配员的能力与技能要求也应相应改变。例如,原先规则要求船员需要具有操作主推进系统和辅助机械、防污染设备,并保持其处于安全状态的技能,现在MASS既可以通过船舶自身的程序设定进行相应操作,也可以由ROC人员进行远程操作,因此对MASS在船船员技能的要求可以相应降低。MASS规则草案中新增规定,MASS均应根据《最低安全配员原则》获得最低安全配员证书并得到主管机关的满意,总配员数可以为0(9)。未来在MASS规则实施过程中,还应进一步明确“得到主管机关满意”的程度与要求如何,提出一份可供主管机关量化考核的MASS性能对应最低安全配员的审核标准。MASS的船东公司应当根据船舶的操作功能与性质编写关于最低安全配员的提案,经管理部门评估批准后获得最低安全配员证书。
当前《最低安全配员原则》不能直接适用于ROC人员,ROC人员需要取得单独的最低安全配员证书。目前IMO的各项规则并未规定船员必须在船上,但各国的国内立法存在不同的情形。2017年3月,国际海事委员会 ( Comiét Maritime International,CMI ) 就当前国际法律框架中可能对无人船的引入构成障碍的问题向会员发布了一份调查问卷。对于ROC人员是否可被视为船员的问题,10个提交回答的国家中只有巴西的国内法没有明确规定船员必须在船上,任何持有海事当局颁发的证书、以专业身份操作船舶的人都可被视为船员。丹麦和芬兰认为在岸上工作的人员也可能被视为船员。普遍来看,将ROC人员排除出MASS的最低安全配员而单独进行规制更有利于全球性MASS规范在各国间的推广与被接受(10)。因此,ROC人员既不能直接适用现有的《最低安全配员原则》,也不能与MASS船上共享同一套最低安全配员证书。ROC人员虽然不属于MASS的配员,但其数量、操作技能等因素都会对该船最低安全配员证书的申请产生直接影响,从而对MASS的航行安全起到至关重要的作用。因此在MASS规则草案中也对ROC的最低安全配员证书作出了规定:ROC人员也应根据《最低安全配员原则》获得最低安全配员证书,该证书应链接至特定的一个或多个MASS,配员可以包括《1978年海员培训、发证和值班标准国际公约》( International Convention on Standards of Training,Certification and Watchkeeping for Seafarers,STCW公约 ) 以外的人员。(11)未来仍需制定可适用于ROC的最低安全配员标准,以推动该项规定落实。
( 二 ) 船员适任——制定MASS人员全球性统一培训发证规范
1.制定MASS在船船员补充培训管理规定
应当针对MASS在船船员的补充培训制定新的规定,确保在船船员能适应MASS运用的新技术、新系统。当前普遍适用于在海船工作的船员培训发证的国际公约为STCW公约及其1995年修正案。MASS在船船员符合STCW公约的适用标准,但因MASS的自主操作和远程控制的技术特性,MASS在船船员需要学习网络通信、自动化、人工智能等知识,掌握自主导航、远程控制、环境信息感知等技术[3],能够在船完成船端智能设备操作和系统故障排查,确保MASS的各项系统安全准确地运行。因此,STCW公约对船员的培训要求和适任标准不足以满足MASS航行安全的要求,还需在原有规定的基础上,对MASS的在船船员进行补充培训。
在MASS船员与ROC人员的培训与适任问题上,MSC第108次会议提出,IMO下设的人为因素、培训和值班分委会 ( Human Element,Training and Watchkeeping,HTW ) 将就MASS的相关操作人员制定更高级别的操作员培训管理规定。(12)2024年HTW闭会期间工作组对STCW公约开展了全面审查,就与MASS有关的立法差距提出了建议(13)。MASS规则草案中对船员的补充培训进行了规定,总结来看可以分为以下三类:第一,在船船员应对MASS操作系统进行学习,增加相关知识储备。这种知识的学习既包括发证机关对其进行的普遍性知识培训,涵盖MASS驾驶所必需的人工智能、信息网络、自动化等基础知识,增进船员对MASS的远程操作系统、态势感知系统、智能避碰系统的应用,也包括船公司针对船员所供职的具体MASS对船员进行的专门培训,增强船员对MASS系统操作和运行的理解,涉及该MASS的操作概念 ( Concept of Operation )、操作设计领域 ( Operational Design Domain )、操作范围 ( Operational Envelope ) 等专门性文件。第二,在船船员应具备当自主操作和远程控制系统故障时接管并手动控制MASS的能力。为避免过度依赖MASS的智能操作系统,在自动化系统发生故障时,在船船员应具有风险评估的能力,及时排除在船端发生的故障;当MASS无法继续自主操作或得到远程控制时,在船船员应当具有基本的船舶驾驶技能,从自主操作系统或远程控制系统中接管船舶,保证航行安全。第三,在船船员应当具有检验、维护、修理船上操作设备的能力,特别是MASS自主操作设备和远程控制设备。在船船员需定期校准自主导航系统,检查通信设备,保持MASS与ROC的通信联系。但MASS规则草案中的规定仅为概括性要求,未来仍需JWG工作组对其进行完善。
2.建立ROC人员的培训发证制度
现有的培训发证制度不能直接适用于MASS的ROC人员,需要重新构建。STCW公约在第3条的适用范围中规定,该公约只适用于在海船上工作的船员,在文义上不能涵盖ROC人员。CMI发布的调查问卷表明,大部分国家也赞同STCW公约不适用于远程控制的无人船,其培训和能力条款不能适用于岸基操控人员(14)。MASS规则草案第15章中规定了在船船员和ROC人员应当具备的补充技能以及开展补充培训的具体要求。(15)未来有必要建立ROC人员专门的培训发证制度,在全球范围内形成像STCW公约一样的普遍性规范,以确保MASS的航行安全。相较于MASS的在船船员,ROC人员的培训更侧重于MASS的远程操作系统,使其能够正确配置操作系统,具备作出正确决策的船舶驾驶能力,能及时解决系统故障。
( 三 ) 船长责任转移——构建不同情境下对MASS船长的监管框架
MASS的船长可能在ROC,因此超出了现有监管框架。CMI发布的调查问卷中讨论了ROC人员能否成为MASS船长的问题。只有巴西、中国和克罗地亚三个国家的国内法将船长定义为船上的人员,其余八个国家法律中并没有要求船长必须在船上,并且其中六个国家认为ROC人员可能成为船长。大部分国家都以类似的措辞将船长定义为指挥船舶的人,并且STCW公约中也有规定,船长系指挥一条船的人。参照此规定,MASS的船长可以被定义为负责指挥MASS的人员。MASS的船长负有与一般船舶的船长相同的权利义务,包括对船舶的指挥、控制、监管,根据其专业判断作出或执行保障船舶航行安全所必需的任何决定。MASS的船长不一定在船上,但其应具备在必要时控制干预MASS的手段和能力,确保MASS在其指挥范围之内(16)。随着船舶自主程度的提高,船长角色将从传统的船舶航行操控转变为更具监督和管理职能,应同时监督船上系统并协调远程控制中心。2024年,MASS联合工作组在第三次会议中提出了新问题:当船长位于ROC且船上有船员时,如果发生断联,船长的权责应何时从ROC转移至船上?如何转移?转移给何人?基于其中涉及的复杂判定情形,工作组提请MSC重新考虑当船上有人时船长能否位于ROC(17)。
MASS规则草案中提到:在某些条件下,多个船长可能对单次航程中的MASS负责,但在任何给定时间内只有一名船长应负责任。基于MASS自主操作和远程控制的独特属性,规则中提到的“某些条件”可以归纳为以下两类特殊情况,需要进一步研究其相应的监管框架:一类是一名ROC人员同时担任多艘MASS的船长,但当前的技术水平使其无法同时处理多条航线的船舶,在出现紧急情况时难以及时作出反应和决策。这种情况可能会在L4水平的MASS上出现。另一类是在单次航程中,一艘MASS存在多名船长,但在该航次中划定的任何一个时间区间内,有且仅有一名船长承担相应的责任。以下是可能出现这种情况的几种情形:第一,根据航行区域安排船长。MASS可以根据船舶的航行区域,如沿海区域、远洋区域、北极区域等,安排不同的船长负责。各区域的操作重点和可能面临的航行安全风险不同,由专门的船长负责可以提升分工的专业化、精细化。[4]第二,根据操作模式安排船长。有船员在船的MASS上必然会出现当远程控制系统故障时,由在船船员接管手动操作船舶航行的情形。当MASS完全转为在船船员手动操作时,船长就会由在船船员接替ROC人员担任,继续指挥船舶。第三,根据值班时间安排船长。当船长为ROC人员时,可能会出现根据值班时间表安排不同的操作人员担任船长的情形。因此,应当结合不同的MASS航行情景对船长构建不同的监管框架。在MSC第109次会议中,委员会要求MASS工作组进一步审议MASS规则草案,编制现有IMO相关规则与《联合国海洋法公约》中涉及船长责任的条款清单,进一步明确船长的哪些职责可以转移给其他人(18)。
三、IMO框架下规制MASS航行安全船舶因素的规则适用性
船舶因素是保证航行安全的内部条件[1]。船舶因素包括船舶的结构设备与船舶的可操纵性,即船员利用船舶上的控制设备操纵航行,改变或保持船舶的航速、航向和航行姿势[5]。由于MASS引入了自主操作和远程控制设备以代替船员进行船舶控制,其船舶结构与可操纵性的评价标准也就相应地与一般船舶不同。
( 一 ) 船舶结构——对MASS新增设备提出新要求
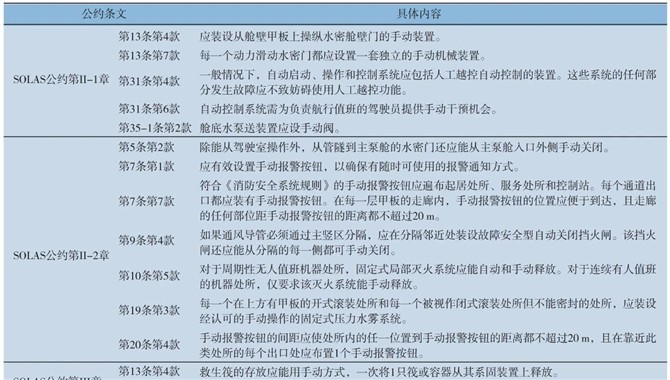
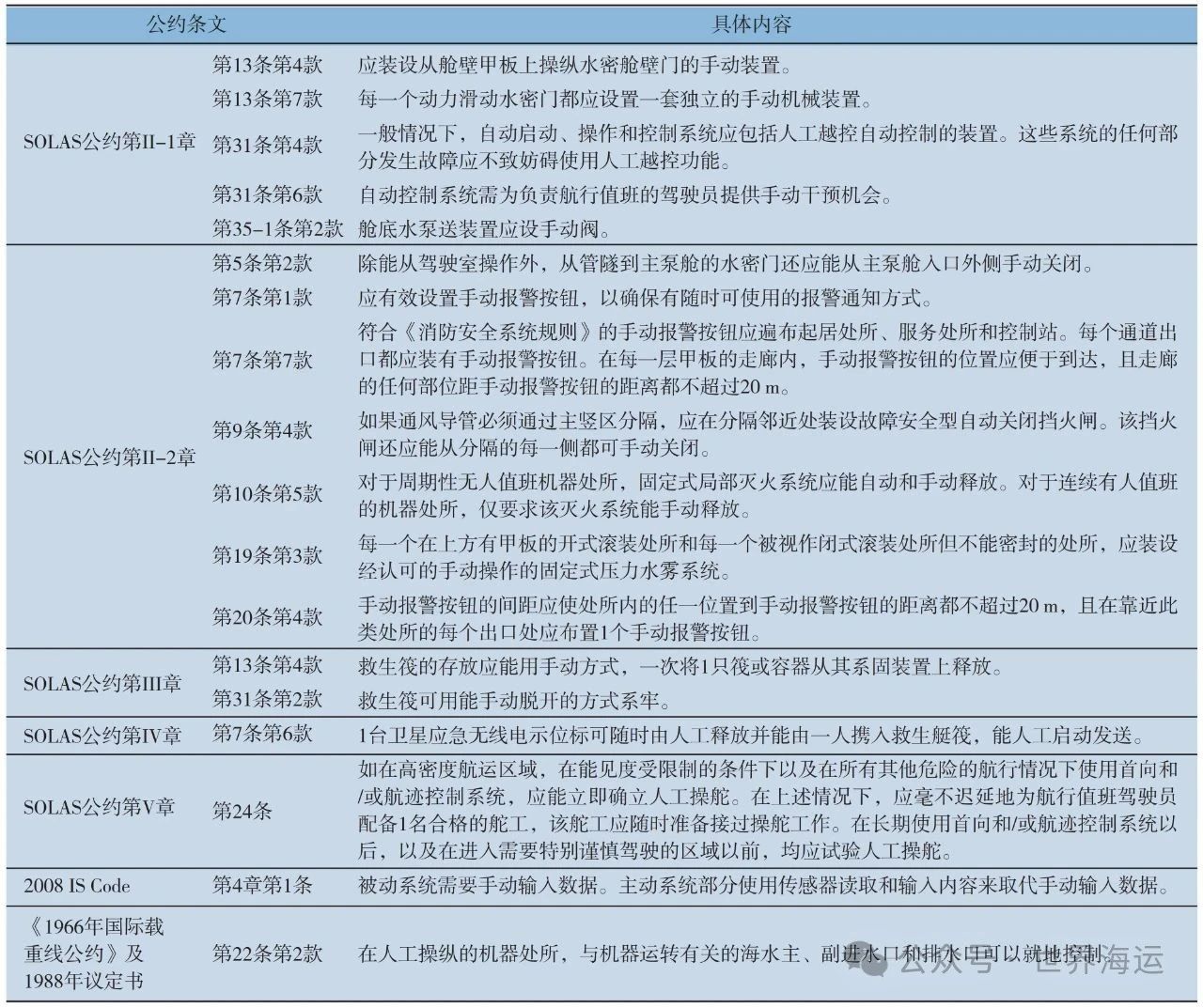
MASS对船舶结构的改变将直接影响IMO相关规则的适用。SOLAS公约在第II-1章中规定了船舶结构、分舱与稳性、机电设备,在第II-2章中规定了船舶的防火、探火和灭火构造,在第III章中规定了救生设备与装置,在第IV章中规定了船舶无线电通信,在第V章中规定了首向和/或航迹控制系统。这些规则都存在不能直接适用于MASS的情况。除SOLAS公约外,2008年IMO制定的《国际完整稳性规则》( International Code on Intact Stability 2008,2008 IS Code )、《1966年国际载重线公约》及1988年议定书也对船舶的可操纵性作出了有关规定。这些规则不能直接适用于MASS主要是因为其规定了需手动操作的设备要求 ( 见表1 )。在船舶结构设计方面,传统船舶需要为保障船员的工作、生活和安全提供必要的空间设备。MASS少人或无人在船的操作模式将大大减少船舶对人用设备的需求,同时增加对自动化控制设备和网络通信设备的需求。在船舶消防系统方面,MASS需要引入完全自动化的消防系统,其需要能够独立完成发现火情、采取灭火措施、向ROC发布火灾信号的全部流程。ROC人员也需要通过远程控制系统时刻监控MASS的消防状况,必要时远程激活消防系统。针对船舶结构,MASS规则草案用“分舱、稳定性和水密完整性”“消防安全”“救生设备”“安全操作管理”四章讨论了其功能要求和预期性能。(19)对于当前不能直接适用于MASS的海事规则,IMO可以在原有的基础上对这些条文作出修改,对MASS的自主操作和远程控制系统提出新的设备要求,如建立能够监控、控制和操作船上可能影响船舶稳定性设备的监督系统,以及能够持续控制装载条件、纵向和局部强度的远程操作系统等。
表1 国际公约条文具体内容
在船舶的结构方面,明确ROC是否可以成为MASS的驾驶台是未来需要解决的关键问题之一。SOLAS公约在第V章第15条(20)中规定了驾驶台设计的有关原则,包括能够促进有效和安全管理驾驶台资源,使驾驶台工作人员和引航员能够方便和连续地获取重要信息等,并没有明确要求驾驶台必须位于船舶之上。在CMI发布的调查问卷之中,有国家认为ROC的功能性决定了其可以成为MASS的驾驶台。ROC只要能够满足SOLAS公约第V章所规定的驾驶台设计原则,就能够被认定为该MASS的驾驶台。(21)从SOLAS公约的原文来看,公约强调在进行驾驶台的设计和布置时需要满足保证船舶航行安全的原则,而非强调驾驶台的形式。本文所讨论的是有船员在船的远程控制MASS,在船端必然会出现一个供在船船员手动操作的驾驶台,未来将出现“双驾驶台”的情形,因此有必要针对ROC的驾驶台制定新的管理规范。
与船舶构造这一船舶因素相关,ROC成为MASS的驾驶台还会带来值班这一人为因素问题。未来,MASS船上与ROC都需要建立值班管理制度。STCW公约第A-VIII/2节第4部分规定,值班人员必须实际在驾驶台和机舱控制室(22)。但ROC人员无法直接适用STCW公约的有关规定,因此目前,国际社会普遍认为ROC应当建立值班制度。《国际船舶安全营运及防止污染管理规则》( International Safety Management Code,ISM规则 ) 提出,船上应当建立安全管理体系 ( ISM系统 )。MSC第108次会议讨论认为,ISM系统应包括MASS和ROC的所有操作程序,包括值班安排。中国《智能船舶规范》( 2023 ) 中提出,远程控制站应建立管理制度,该制度必须包括人员配备要求和值班要求。《欧洲海事安全局最终报告:远程操作中心MASS操作员能力识别》中指出,高级船员的值班能力同样是监控和控制MASS所必需的,对有船员在船的远程控制MASS需要做好驾驶台资源管理 ( Bridge Resource Management )。这里所说的驾驶台资源管理是指在MASS的驾驶台上通过有效的沟通、协调来利用所有可用资源 ( 包括人力、设备和资源 ),保障船舶的航行安全[6]。相较于一般船舶,MASS的驾驶台资源管理涵盖了船舶本身和ROC两部分,对驾驶台控制人员的统筹协调能力和船端岸基的通信能力提出了更高要求。
( 二 ) 船舶可操纵性——对MASS自主功能实现提出新要求
基于风险的评估工具 ( Risk Based Assessment Tool,RBAT ) 是由欧盟委员会和欧洲海事安全局主导的项目,用于在MASS初步设计时对其进行风险评估。RBAT将对MASS的风险评估分为五步,其中第一步就是描述MASS自动化的使用[7],并对MASS的“自主”作出了定义:自主 ( Autonomous ) 指在MASS系统中,在特定条件下由自动化控制且无须人工协助的过程或设备。自主功能 ( Autonomous Functions ) 是指可以在复杂和开放的环境中以高度独立和自决的方式运行的功能。自主功能能够感知、学习、推理和以自我意识行事,并智能、适当地应对环境中不可预见的变化。MASS的自主功能需要通过船舶的态势感知系统、智能避碰与控制系统来实现。
1.态势感知系统——统一衡量MASS态势感知效果的评测体系
态势感知 ( Situational Awareness ) 是指对环境元素和事件在时间或空间上的感知,对其意义的理解,以及对其未来状态的预测[8]。MSC第107次会议报告指出,态势感知能力应根据操作模式进行分类,不同类型的态势感知能力会因提供对象 ( 船员、远程操作员等 ) 和功能性不同而有所不同(23)。MASS的态势感知主要应用于自主导航系统 ( Autonomous Navigation System,ANS )。这里所说的ANS指具有态势感知,航路规划和确定,碰撞和搁浅风险规避,船舶航向、速度和航迹控制等功能的系统(24)。MSC第108次会议明确提出,对MASS导航系统进行规制的目标是保障船舶的航行安全(25)。
态势感知系统是MASS的必要组成部分,对船舶的航行安全具有重要意义。当前许多国家已经在智能船舶规范中对态势感知系统作出了规定:2020年英国海事组织发布的《海上自主水面船舶——英国行业行为准则原则和实践规范》中对态势感知和控制系统作出了专章规定,将MASS的态势感知系统分为船载传感器和船外信息源内外两部分,提出应当对MASS的态势感知成果进行风险评估,如失效模式影响分析 ( Failure Modes and Effects Analysis,FMEA ),以判断MASS基于态势感知成果进行自主操作或远程控制所产生的风险水平。2021年挪威船级社发布的《自主船舶和遥控船舶》中也对态势感知作出专章规定,但此规定中的态势感知指的是ROC人员的态势感知能力,并且将不同的人类感官如何为特定功能的态势感知做出贡献作为风险分析的一部分来考虑。在MASS中,传感技术替代传统的人类感官向ROC人员提供信息,以实现远程操作。基于人类感官,MASS的态势感知可以分成视觉、听觉和其他感官 ( 平衡和加速度、嗅觉和温度 ) 三类,传感技术需要感知并提供相应的信息,确保ROC人员能够理解当前MASS所处的条件和所面临的事件。中国的《智能船舶规范》( 2025 ) 根据MASS的航行场景规定了态势感知的具体内容:在开阔水域,MASS需要感知航行中的实时环境气象数据、本船的实时信息、水上目标船舶自动识别系统 ( Automatic Identification System,AIS ) 的数据、电子海图数据及更新、海上其他目标的实时信息以及船舶所在位置的实测水深六个方面;在狭窄水道、进出港口等场景,MASS还需要感知船首、船尾与岸的间距及船岸间的角度,获得港口航道潮汐、流速、流向变化信息及其他相关环境信息。MASS规则草案将MASS航行中需要态势感知系统持续监测的项目分成以下三类:周围海面上与航行安全相关的静态和动态物体、船舶的自身状态、与航行安全相关的地理信息和环境条件。(25)
当前的MASS规范对态势感知的规定多是停留在对态势感知内容的描述上,缺乏对态势感知成果的有效评估。当MASS的相关技术能够替代人体进行态势感知时,需要对其态势感知的效果进行合理评估,确保ROC人员所获得的态势感知整体上等同或优于传统的本地态势感知[9]。英国海事组织发布的规范中提出,可以通过FMEA来判断态势感知的成果[10],但该分析方法尚未在MASS领域形成系统的监测方法。对于船载感知设备的管理已经有国家进行了有益尝试,如中国船级社2003年发布的《自动识别系统 ( AIS ) 检验指南》、中华人民共和国海事局2010年发布的《国内航行船舶船载电子海图系统和自动识别系统设备管理规定》和2021年发布的《船载B级自动识别系统设备技术要求 ( SOTDMA )》。但这些规范仅针对孤立的船载感知设备,无法判断多感知设备协同工作时的综合航行态势感知能力。未来还需在全球范围内建立适用于MASS态势感知的评测体系[11]。
2.智能避碰与控制系统——量化《国际海上避碰规则》中的模糊术语
现有的《国际海上避碰规则》( Convention on the International Regulations for Preventing Collisions at Sea,COLREGs ) 可以完全适用于MASS。从COLREGs的适用范围来看,其适用于公海和连接于公海而可供海船航行的一切水域中的一切船舶,包含MASS。先前,对于COLREGs能否适用于MASS的问题,争论主要集中在其第5条(26)瞭望的相关规定。在MSC第107次会议上,委员会认为该条文中所规定的需要进行瞭望的主体是“船舶”,而非“人员”,因此COLREGs可以全面适用于任何MASS,不需要对其进行修改(27)。MASS应能够作出符合COLREGs的避碰决策和路径规划,识别附录IV的遇险信号,及时开展救助。
COLREGs中部分模糊的术语给MASS的智能避碰与控制系统设计造成了阻碍。MASS的智能避碰系统通常通过以下的逻辑运行:各个传感器采集来自船舶本身和船舶之外障碍物的信息,将数据传入避碰决策系统,再由决策系统给出避碰的操作指令[12]。决策系统需要对各传感器获取的多源异构、多模态信息进行理解,对当前的航行态势进行结构化表述,结合COLREGs与实践中通常做法对船舶会遇场景进行量化划分,在此基础上做出相应的避碰决策[13]。当MASS的智能避碰系统给出避碰的操作指令后,MASS的智能控制系统将对船舶进行操作,实现船舶避碰。COLREGs的一些条款用语存在模糊的情况,交由驾驶员在具体的航行场景下进行解释分析,如第15条交叉相遇局面中的“当时环境许可”(28),第16条让路船的行动中的“尽可能及早”“宽裕地让清他船”(29),第17条直航船的行动中的“本船不论由于何种原因逼近到单凭让路船的行动不能避免碰撞时”(30)。这些关键词在自动操作程序设计和软件编程中如何进行解释为COLREGs的适用带来了困难。这些问题在即将出台的MASS规则中仍未得到明确。实践中,编程人员可能需要研究某一特定区域的自动识别系统数据[14],总结现有船舶避碰操作实例,从中得出上述关键词的具体范围,进而量化这些模糊术语。
3.网络通信安全——构建全球性MASS网络通信安全防护体系
MASS的通信系统连接着船端的自主操作系统与ROC的远程控制系统,该系统需要及时将船端采集的信息发送到岸端,并将岸基远程控制指令发送至船端[15]。2016年,海事安全行业平台SAFETY4SEA针对智能船舶展开调查,结果显示网络安全是智能航运面临的最大挑战 ( 占比40.6% ),大多数参与调查者 ( 占比78.8% ) 认为该行业对网络风险的抵御能力不高[16]。确保MASS的通信系统可靠、稳定、安全对保障船舶的航行安全至关重要。
目前海事网络风险管理体系已经形成,MASS可以适用其中的各项管理规则。2017年,IMO发布《海事网络风险管理指南》,提出海事网络风险是技术资产受到潜在环境或事件威胁的一种量度,其可能由于信息或系统损坏、丢失或破坏而造成航运相关操作、安全或保安故障,要求构建并实施有效的海事网络风险管理机制,根据标识、保护、发现、响应、恢复的功能要素构建网络风险管理框架(31)。同年,MSC第98次会议通过《安全管理体系中的海事网络风险管理》的决议,要求各国政府、船级社、船东、设备制造商等相关主体采取措施,避免航运业受到网络威胁,鼓励各国根据《国际安全管理规则》的要求,将网络风险管理程序纳入现有的安全管理体系。(32)此后,各国船级社开始编写海事网络风险管理的相关规则,为业界执行上述两个决议提供具体操作指南。2019年,中国船级社制定并发布《海事网络风险评估与管理体系指南》,介绍了海事网络的基础知识,提出了进行海事网络风险评估的方法,给出了海事网络管理体系的制定、执行和改进的建议。2020年,国际船级社协会 ( International Association of Classification Societies,IACS ) 提出了UR E26和UR E27两套网络安全统一规则:UR E26通过要求系统供应商和船厂在设计MASS时考虑网络安全问题,确保船舶的各个系统均具备网络安全防护措施;UR E27要求在船载系统中纳入网络安全弹性设计和网络安全管理措施,确保船舶在运营过程中不易受到网络威胁。基于此,挪威船级社构建了网络安全船级符号体系,通过评估船舶的整体网络设计、船岸连通性、船载系统设计、船员和船舶管理程序等问题,为船舶提供网络安全措施证明,确保相关船舶符合IACS的统一规范要求[17]。2023年,美国船级社 ( American Bureau of Shipping,ABS ) 发布《船舶和近海工业网络安全实施指南》(33),提供了海事网络安全风险评估流程,构建了基于ABS网络安全工程评审和检查模型的网络安全风险管理系统 ( CRMS )。针对网络通信安全,MASS规则草案明确了应当满足的一般通信要求,包括建立起MASS与所有相关实体之间的通信,建立始终可用、可靠、稳定和安全的通信,确保相关人员能够监控MASS通信故障。此外,MASS规则草案还针对船舶与ROC之间的通信提出了特殊要求。(34)
当前的MASS网络风险管理体系存在以下问题:第一,协调跨国MASS网络通信监管存在困难。在处理船舶的网络通信安全问题时,不同文化背景的管理者对其存在不同的认知,采用的措施也会因技术发展水平不同而不同。东亚国家将网络通信安全视为一种风险因素,将其归入影响船舶航行安全的整体因素,西方国家则将网络通信安全视为需要IT从业者单独处理的独立风险[18]。当前的海事网络安全管理规则大多是由各国船级社依据IMO的ISM规则制定的操作指南,其实施标准、认证流程都存在差异。例如,挪威船级社通过为MASS提供专门的网络安全船级符号来保障MASS运营各个环节的网络通信安全,ABS则基于网络安全工程评审和检查模型构建了独有的网络安全风险管理系统。各国不同的操作指南在MASS网络通信的设计、执行和认证流程上都存在差异,构建全球统一的MASS网络安全防护体系十分困难。在跨国航运中,MASS可能需要经过不同国家的港口,如果各个港口的网络通信安全要求不同,MASS就需要不断调整防护措施来满足各国不同的标准。第二,MASS所面临的网络攻击具有全球性,一起网络攻击可能同时影响多个国家或地区的航运安全,损害多个供应链的资产、信息和系统的可用性、完整性与保密性。这些攻击的累积效应可能导致整个供应链中断,进而影响整个行业或地区。在航运业中,如果云服务或卫星通信受到网络攻击,这种“级联效应 ( Cascade Effect )”可能引发整个航运业的安全危机[19]。因此,世界各国需要加强合作,构建全球性的MASS网络通信安全防护体系。
未来在MASS的网络通信安全方面还需要进一步研究如何避免黑客攻击、避免关键信息泄露、遇网络攻击时的应急预案等问题,可以从以下三个层面推进MASS网络通信安全海事规则体系构建:第一,构建统一的行业技术标准。推广IACS统一规则UR E26和UR E27在全球范围内实施,确保每一艘MASS在进行系统设计时都纳入了保护MASS和ROC系统的安全防护措施,隔绝未经授权的访问和网络威胁。第二,各国根据实际情况构建本国的船舶网络通信安全风险管理体系。该体系应基于全面合理的风险评估,在MASS的设计建造阶段进行初始风险评估,在MASS投入运营后定期开展风险评估,为每一艘MASS制订在受到网络威胁时能够快速响应恢复的应急管理预案。港口和船舶应当配备专门的网络事件响应人员,以有效应对潜在的网络安全风险(35)。第三,完善网络安全立法。针对网络安全,世界各国均有一定的立法基础,但发布时间普遍较早,难以应对当前新的网络安全问题,例如,中国的《中华人民共和国网络安全法》于2016年发布,日本的《网络安全基本法》于2016年发布,新加坡的《网络安全法》于2018年发布。随着MASS应用的物联网、区块链技术进一步成熟,各国的网络安全法还需进一步调整完善,解决随着技术发展产生的新的网络安全问题。在MSC第109次会议中,委员会考虑在第110次会议中成立工作组,制定船舶和港口设施的网络安全标准,在2026年完成加强海事网络安全的进一步措施(36)。
四、IMO框架下规制MASS航行安全交通环境因素的规则适用性
影响船舶航行安全的环境因素可以分为两方面,一方面是风浪、洋流、水深、可见度等气候环境要素,另一方面是船舶通航条件、港口管理、航道宽度等航行环境要素。通过人为远程控制或船舶自主操作可以减少或避免其中部分要素对MASS航行安全的影响,如利用态势感知系统感知礁石和风浪,再通过智能避碰和控制系统调整航行完成避碰。本节将讨论受外部主体调控的环境因素,包括港口安保管理和船舶交通管理系统 ( VTS )。
( 一 ) 港口安保管理——修订《国际船舶与港口设施保安规则》,增强港口对MASS的管理能力
当前的港口安保管理相关规则并未考虑到MASS应用的情形,不能全部适用于MASS。SOLAS公约在第XI-2章“加强海上保安的特别措施”第10条中规定了对港口设施的要求,缔约国政府应根据该章节和《国际船舶与港口设施保安规则》( International Ship and Port Facility Security,ISPS规则 ) 的规定,确保开展港口设施保安评估,制定、评审、批准并实施港口设施保安计划,对港口开展持续性的安保管理与监督。各国也制定了本国的港口安保管理法律法规:2002年,美国通过《海上运输安全法》,构建起区域海上运输安全计划和港口设施保安计划制度。2004年,欧盟根据ISPS规则发布《关于加强船舶和港口设施安全的第725/2004号条例》,明确各成员国应对国际和国内航运中的港口设施进行安全评估和制订保安计划。同年,英国出台《2004年船舶与港口设施保安条例》,该条例将欧盟的第725/2004号法规纳入英国国内法。2007年,我国交通运输部根据SOLAS公约、ISPS规则和《国际海运危险货物规则》制定了《中华人民共和国港口设施保安规则》,对港口的保安等级、保安评估、保安计划及保安培训演习等问题作出了明确规定。该规则与国际港口保安标准接轨,兼顾我国国情,确保港口的安全稳定运行。
MASS规则草案中并未涉及港口安保管理和VTS等影响船舶航行安全的环境因素,未来仍需针对现有的规则指南进行适用于MASS的调整。ISPS规则需要针对MASS调整如下内容:第一,船舶保安员可由ROC人员担任。ISPS规则中的船舶保安员是指由公司指定的承担船舶保安责任的船上人员,需要实施和维护《船舶保安计划》,与公司保安员和港口设施保安员进行联络。当MASS没有在船船员时,船舶保安员应由ROC人员担任。第二,将ROC纳入船舶保安范围。应将ROC的保安也纳入船舶保安计划,如防止将企图用于攻击人员、设备的武器、危险物质和装置擅自携入ROC的措施,对威胁或破坏保安状况作出反应的程序等。第三,完善港口保安计划,及时有效应对MASS上产生的安全问题。港口需制定出当位于该港口的MASS船上保安警报系统被启动后作出反应的程序,解决如何及时联系该船的ROC、如何在船上无人时登船等问题。港口需通过建立受到网络攻击时的级联效应模型,制定相应的安全措施,增强港口应对日益严峻的混合网络物理威胁的能力。[20]
此外,港口还应当建立与MASS的ROC及时有效的沟通机制,增强对MASS的管理能力;调整港口的交通管理系统,在MASS初步投入使用的时候划定专门航道供MASS航行,减少碰撞和触碰事故的发生;建立MASS应急响应机制,包括事故报告、应急救援等环节,确保在MASS出现故障或发生事故时可以快速有效地处理。
( 二 ) VTS——构建满足MASS要求的VTS
当前的VTS对MASS的服务能力不足,未来需要建立能够满足MASS要求的全套服务体系。SOLAS公约在第V章“航行安全”第12条中提出,VTS有利于航行安全,各缔约国应承担建立VTS的义务,根据《船舶交通服务指南》规划和实施VTS,同时确保悬挂其国旗的船舶均参与并遵守。2021年,IMO第32届大会通过了最新《船舶交通服务指南》(37),明确了缔约国、VTS主管机关、VTS提供者及其参与船舶的责任,对VTS法律框架、一般原则等问题作出规定。国际航标协会 ( The International Association of Marine Aids to Navigation and Lighthouse Authorities,IALA ) 成立了VTS委员会,针对VTS运营、技术和培训分别成立了工作组,围绕IALA制定的VTS五项标准(38)开展工作。IALA还发布了针对VTS操作人员、监督人员设计的示范课程;推出了一系列关于VTS操作和管理的建议文件,帮助各国在VTS人员的培训和认证、VTS的建立等方面形成统一的规范;制定了涵盖VTS管理各项操作程序的指南,如VTS信息的描述、如何在VTS中推广安全文化、核心VTS系统和设备的生产要求、VTS管理以及如何在内陆水域开展VTS。各国也建立了VTS的国内规则,如澳大利亚的《第64号海事条例:船舶交通服务 ( VTS )》、我国的《中华人民共和国船舶交通管理系统安全监督管理规则》等,进一步细化了SOLAS公约、《船舶交通服务指南》、IALA的标准建议,结合本国国情规范开展VTS。
针对MASS,VTS需要做出以下调整:第一,建立与MASS及其ROC的通信,VTS中心应具备识别、监视和远程控制MASS的能力。当发生紧急情况、突遇恶劣天气或船舶出现故障时,VTS应为MASS提供助航服务,这就要求VTS与MASS及其ROC建立稳定的实时通信[21],增加关于MASS与ROC之间连通性的详细要求,包括冗余设计、服务质量等方面,必要时VTS需远程控制MASS。VTS主管部门还需要提供必要的通信基础设施,以支持VTS与MASS之间的大量数据传输。第二,对VTS操作员进行开发适应性培训,以确保其掌握的知识与技能能够适应新的变化[22] 。主管机关应当为服务于MASS的VTS值班员进行补充培训,使其具备为MASS提供交通服务的能力,包括操作与MASS通信的能力、操作监测MASS设备的能力和为MASS提供助航服务的能力等。
五、结语
MASS的航行安全规则对推动MASS技术进一步发展并投入使用具有重要意义。在MASS规则即将出台的背景下,厘清当前IMO相关规则对影响MASS航行安全三个重要因素的适用性,将有助于推动MASS国际海事治理体系进一步完善,提升我国国内法与MASS规则的衔接,促进我国智能航运向好向快发展并迸发出更大的活力。
参考文献:
[1] 刘元丰,唐兴莉.基于模糊综合评判方法的船舶航行安全评价[J].重庆交通学院学报,2004(3):123-126.
[2] 严德武,黄厚铭.人为因素在船舶航行安全中的影响分析[J].中国科技纵横,2013(17):1.
[3] WANG D L,WU D K,HUANG C H,et al.Marine autonomous surface ship—a great challenge to maritime education and training[J].American Journal of Water Science and Engineering,2020,6(1):10-16.
[4] GOERLANDT F.Maritime Autonomous Surface Ships from a risk governance perspective:interpretation and implications[J]. Safety Science,2020,128:104758.
[5] 张秀凤,姜华,洪碧光.浅析船舶通航安全的影响因素[J].大连海事大学学报,2003(1):48-51.
[6] 李健.驾驶台资源管理与船舶的航行安全[J].中国航海,2006(1):42-45.
[7] 王新宇.欧盟海上自主水面船舶风险评估实践[J].中国船检,2023(6):56-64.
[8] ENDSLEY M R.Toward a theory of situation awareness in dynamic systems[J].Human Factors,1995,37(1):32-64.
[9] DNV.Autonomous and remotely operated ships 2021[EB/OL].(2021-09-20)[2025-03-13]. https://standards.dnv.com/explorer/document/ 61F34A49A17F4929A6BE38765C68A19B/3.
[10] Maritime UK.Maritime Autonomous Surface Ships industry conduct principles & code of practice version 4[EB/OL].(2020-10-17)[2025-03-13].https://www.maritimeuk.org/media-centre/publications/maritime-autonomous-surface-ships-industry-conduct-principles-code-practice-v4/.
[11] 孙旭,郑凯,公丕永,等.智能船舶航行态势感知技术现状[J].船舶工程,2022,44(4):14-25.
[12] 谢朔,初秀民,柳晨光,等.船舶智能避碰研究综述及展望[J].交通信息与安全,2016,34(1):1-9.
[13] 丁志国,张新宇,王程博,等.基于驾驶实践的无人船智能避碰决策方法[J].中国舰船研究,2021,16(1):96-104.
[14] PORATHE T.Maritime Autonomous Surface Ships(MASS) and the COLREGS:do we need quantified rules or is “the ordinary practice of seamen”specific enough?[J].Transnav-international Journal on Marine Navigation and Safety of Sea Transportation,2019,13(3):511-517.
[15] 高宗江,张英俊,孙培廷,等.无人驾驶船舶研究综述[J].大连海事大学学报,2017,43(2):1-7.
[16] The Editorial Team.SAFETY4SEA survey reveals industry’s smart side[EB/OL].(2017-01-16)[2025-03-13].https://safety4sea.com/safety-4sea-survey-reveals-industrys-smart-side/.
[17] DNV.Building strong cyber security into ship design[EB/OL].(2023-10-11)[2025-03-13]. https://www.dnv.com/expert-story/maritime-impact/building-strong-cyber-security-into-ship-design/.
[18] KARAMPERIDIS S,KAPALIDIS C,WATSON T.Maritime cyber security:a global challenge tackled through distinct regional approaches[J].Journal of Marine Science and Engineering,2021,9(12):1323.
[19] HERBURGER M,WIELAND A,HOCHSTRASSER C.Building supply chain resilience to cyber risks:a dynamic capabilities perspective[J].Supply Chain Management:An International Journal,2024,29(7):28-50.
[20] ADAMS N,CHISNALL R,PICKERING C,et al.Guidance for ports:security and safety against physical,cyber and hybrid threats[J].Journal of Transportation Security,2021,14:197-225.
[21] PARLOV I.Can the international regulatory framework on ships’routing,ship reporting,and Vessel Traffic Service(VTS) accommodate Marine Autonomous Surface Ships(MASS)?Exploring the autonomy-neutral character of the existing regulations[J].Ocean Development & International Law,2023,54(2):163-180.
[22] CHONG J C.Impact of Maritime Autonomous Surface Ships (MASS) on VTS operations[D].Malmo:World Maritime University,2018.
作者简介:
刘晨虹,大连海事大学法学院,副教授。
王义雯,大连海事大学法学院,硕士研究生。
(1)MSC 104/18.
(2)MSC 105/20.
(3)MSC 106/19.
(4)MSC 109/22.
(5)为了克服基于规范的标准无法适应新设计船舶的困境,IMO在船舶的设计与监管中引入了基于目标的理念。GBS即为基于目标的标准,是通过船舶法规、规则和标准来满足的高级标准和程序。GBS应包括至少一个目标、与该目标相关的功能需求,以及法规和规则满足功能需求 ( 包括目标 ) 的符合性验证。有关组织需要针对目标和功能需求制定法规和规则,这些法规和规则经审核验证后成为GBS框架的一部分。《国际极地水域船舶作业规则》《国际气体及低闪点燃料动力船舶安全规则》均为可借鉴的应用GBS原则的成果。
(6)MSC.1/Circ.1394/Rev.2.
(7)A.1103 ( 29 ).
(8)MSC 109/5.
(9)MSC 109/5.
(10)ComitéMaritime International. Summary of responses to the CMI questionnaire on unmanned ships.2018.
(11)MSC 109/5.
(12)MSC 108/20.
(13)HTW 11/6.
(14)Comité Maritime International. Summary of responses to the CMI questionnaire on unmanned ships.2018.
(15)MSC 109/5.
(16)Comité Maritime International. Summary of responses to the CMI questionnaire on unmanned ships.2018.
(17)MSC 109/5/2.
(18)MSC 109/22.
(19)MSC 109/5.
(20)SOLAS公约第V章第15条 关于驾驶台设计、航行系统和设备的设计和布置以及驾驶台程序的原则
所有为应用本章第19、22、24、25、27和28条要求而作出并影响驾驶台设计、驾驶台航行系统和设备的设计和布置以及驾驶台程序的决定,都应旨在:
.1通过对情况进行全面评估和在所有操作条件下安全操纵船舶,帮助驾驶台工作人员和引航员执行任务;
.2促进有效和安全管理驾驶台资源;
.3使驾驶台工作人员和引航员能够方便和连续地获取重要信息。这些重要信息以清晰和明确的方式表达,并使用用于控制和显示的标准化符号和编码系统;
.4指示自动功能和集成部件、系统和/或分系统的操作状态;
.5使驾驶台工作人员和引航员能迅速、连续和有效地处理信息和作出决策;
.6防止或最大限度减少驾驶台内可能导致驾驶台工作人员和引航员疲劳或干扰其警惕性的过多或不必要的工作及任何情况或分散注意力的事物;和
.7通过监视和报警系统最大限度降低人为错误的风险并在发生人为错误时可探测到,以使驾驶台工作人员和引航员及时采取相应行动。
(21)Comité Maritime International. Summary of responses to the CMI questionnaire on unmanned ships.2018.
(22)STCW A-VIII/2 Part4-1
18.1 at no time shall the bridge be left unattended
24 The officer in charge of the navigational watch shall:
.1 keep the watch on the bridge;
.2 in no circumstances leave the bridge until properly relieved; and
.3 continue to be responsible for the safe navigation of the ship, despite the presence of the master on the bridge,until informed specifically that the master has assumed that responsibility and this is mutually understood.
(23)MSC 107/5/7.
(24)MSC 107/5/10.
(25)MSC 108/4.
(26)COLREGs第5条 瞭望 每一船舶在任何时候都应使用视觉、听觉以及适合当时环境和情况的一切可用手段保持正规的瞭望,以便对局面和碰撞危险作出充分的估计。
(27)MSC 107/20.
(28)COLREGs第15条 当两艘机动船交叉相遇致构成碰撞危险时,有他船在本船右舷的船舶应给他船让路,如当时环境许可,还应避免横越他船的前方。
(29)COLREGs第16条 须给他船让路的船舶,应尽可能及早采取大幅度的行动,宽裕地让清他船。
(30)COLREGs第17条 ( a ) ( i ) 两船中的一船应给另一船让路时,另一船应保持航向和航速。( ii ) 然而,当保持航向和航速的船一经发觉规定的让路船显然没有遵照本规则条款采取适当行动时,该船即可立即独自采取操纵行动,以避免碰撞。( b ) 当规定保持航向和航速的船,发觉本船不论由于何种原因逼近到单凭让路船的行动不能避免碰撞时,也应采取最有助于避碰的行动。( c ) 在交叉相遇局面下,机动船按照本条 ( a ) ( ii ) 项采取行动以避免与另一艘机动船碰撞时,如当时环境许可,不应对在本船左舷的船采取向左转向。( d ) 本条并不解除让路船的让路义务。
(31)MSC/FAL.1/Circ.3/Rer.1.
(32)MSC.428 ( 98 ).
(33)ABS. Guide for Cybersecurity Implementation for the Marine and Offshore Industries—ABS Cyber Safety第2卷。
(34)MSC 109/5.
(35)MSC 109/7.
(36)MSC 109/22.
(37)A.1158 ( 32 ).
(38)分别为Standard 1040 Vessel Traffic Service,Standard 1050 Training and Certification,Standard 1060 Digital Communication Technologies,Standard 1070 Information Services,Standard 1010 Marine Aids to Navigation Planning and Service Requirements。
本文刊发于《世界海运》2025年第5期,转发须注明作者和原文出处。

09-18 来源:信德海事网

10-10 来源:信德海事网 苏婉

01-27 来源:信德海事网

05-07 来源:信德海事网

12-21 来源:信德海事网

02-11 来源:信德海事网

09-24 来源:信德海事网

12-30 来源:信德海事网

01-08 来源:蓝盾安检创新工作室
06-30 来源:航运安全新动态