随着人工智能、通信技术等迅速发展和广泛应用,船舶航行正引入智能要素,船舶自主航行技术应运而生,无人完全自主航行船舶成为船舶智能化发展的终极目标。当前,自主航行船舶还未能如常规船舶一样正常营运,实船试航和功能测试仍然是无人自主船舶技术研究和突破的主要阵地。本文主要梳理和分析相关组织和机构在无人自主船舶试航测试阶段的相关要求,以及我国针对无人自主船舶试航测试标准建设的现状,并对实船试航测试标准体系提出基本框架和具体建设内容。
01 概 述
本文所述的水面自主船舶(MASS,Maritime Autonomous Surface Ship)是国际海事组织在针对智能化船舶开展立法范围界定工作中提出的概念,与智能船舶、无人船等概念相似,具有智能化技术应用的共同点,但侧重点又有所不同。水面自主船舶(MASS)是指在不同程度上独立于人的作用而运行的船舶,主要划分为船员在船配备自动化流程和决策支持、船员在船可远程操作、远程操作但船员不在船、完全自主四级。在本文中,将以定义中的第三、四级自主船舶即水面无人自主船舶为研究主体,开展实船试航标准研究和探讨。
02 无人自主船舶实船试航的相关规定
一般情况下,自主航行船舶从设计阶段开始,需要经过仿真测试、模型测试、功能测试、实船试航等一系列测试活动,由于复杂的海况对自主航行船舶的功能发挥有很大的影响,相比于仿真、模型等方面的测试,通过实船试航来验证整船功能的可靠性是必经之路。同时,由于无船员在船,完全依赖配置的各种智能化设备、传感器、航行系统等,无人自主船舶实船试航标准必然与常规船舶有所不同。

国际海事组织在2019年针对自主船舶试航发布MSC1604号通函《水面自主船舶试航暂行指南》,世界主要船级社也针对无人自主航行船舶或系统发布专门规范或指南,如下表相关组织和机构关于自主航行船舶试航方面的规定。其中,国际海事组织通函目的在于协助有关当局和利益相关方确保水面自主船舶(MASS)相关系统和基础设施的试验安全、可靠并做到环境保护,是宏观性的要求,在试航内容、要求、标准等没有具体给出;同样,各大船级社的规范或指南也没有具体的试航标准要求,要么是宏观的表述,要么指向IMO的通函。英国海事协会发布《海上自主船舶系统行业行为准则和实践守则》,在自主航行船舶实践操作方面给出较为详细的规定,同时也给出一些试航具体要求,提供了试航计划的模板,为自主船舶试航提供指导。
表1 相关组织或机构在自主船舶试航测试的规定


当前,我国在自主船舶实船试航方面还没有针对性的标准或指南,根据工业和信息化部2021年2月发布的《智能船舶标准体系建设指南》(二次征求意见稿),已经对智能船舶测试验证方面做出了顶层设计,其中明确智能船舶测试与验证标准分为仿真、模型、实船三类,其中实船测试与验证标准是对全船和系统设备实船测试与验证的内容、方案等进行的规定。
从国内外的相关指南、规范或标准的现状可以看出,当前还没有专门的自主船舶实船试航测试内容的标准可使用和参考,在当前仍以自主航行试航测试研究为主要阶段、试航测试内容标准空白的背景下,开展自主船舶实船试航标准建设的必要性和重要性显而易见。
03 无人自主船舶实船试航标准研究
如前文所述,本文以国际海事组织定义中的第三、四级自主船舶即水面无人自主船舶为研究主体,开展该类船舶实船试航标准研究和探讨,主要针对船舶自主航行相关配套功能提出试航标准框架和要求,暂未涉及船舶货物管理等方面的自主功能。如下图所示。
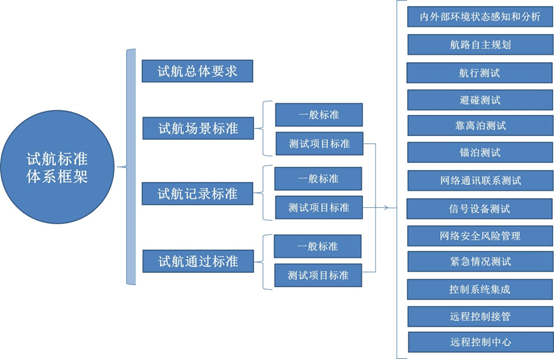
图1 实船试航标准框架
水面无人自主船舶实船试航标准框架包括四个主要方面:试航总体要求、试航场景标准、试航记录标准、试航通过标准,并针对不同的测试项目在场景、记录、通过等方面进行细分。
试航总体要求是对实船试航的纲领性要求,无人自主船舶实船试航需要全部满足,试航场景标准是指针对试航的内外部环境选取、布置的标准,试航记录标准是针对试航过程的记录内容、格式、形式等标准要求,试航通过要求是试航过程中各功能或整体测试的达标要求。
场景、记录、通过这三个方面分别分为一般标准要求和具体测试项目标准,一般标准要求是指试航的通用性标准要求,具体测试项目标准是指船舶具体的自主功能测试验证标准
3.1试航总体要求
试航总体要求是对试航的整体性、通用性要求,主要包括如下几个方面:
(一)实船试航前,已完成了仿真、模型测试工作并通过验证。
(二)试航前,已按照常规船舶开展试航并通过检验。
(三)已按照IMO《水面自主船舶试航暂行指南》要求,开展了相应的风险评估分析和应急处置方案。
(四)按照相应的配员规定船上配置有资质的船员。
(五)试航过程中,发生紧急情况时,确保船上人员能够直接进行人工操作接管。
(六)当船舶自主航行发生故障不能解除时,测试船舶应能够及时发出人工接管请求信号,提示船上人员接管船舶。
(七)测试船舶应在所有需要知悉船舶操作模式的位置,正确显示当前船舶操作模式,即远程控制、自主航行、人工操作模式。
(八)单次试航可涵盖多个具体测试项目,测试项目可结合开展,但不能因为结合开展而互相影响测试程序、效果。
3.2 试航场景的一般要求
试航场景的一般要求适用于所有具体测试项目,主要有如下标准要求:
(一)除了需要夜间测试的项目外,试航测试项目应尽可能在日出至日落期间开展。
(二)测试区域内实现网络通讯信号覆盖且强度足够,保障通讯联系和船舶监控的有效。
(三)试航水域环境良好,无超过船舶航行限制的恶劣海况天气,能见度满足船上监控人员的观察需要。
(四)试验场内试航应确保无外来船舶干扰。
(五)应确保试航水域航标等助航标志正常运行。
(六)应有专门的警示或守护船舶伴航。
3.3 试航记录一般要求
自主船舶航行将产生大量不同类型的数据,且需要进行记录,以作为技术研究和事故调查需要使用。远程控制中心、自主船舶存储的数据应至少保存30天,若数据是专门格式,还应保证数据能够转换。
无人自主船舶试航应配置全过程记录装置,对试航全部测试项目进行如实记录,确保船舶和自主功能设备运行数据、航行气象数据、航行指令数据等记录完整、不间断,通用的记录内容包括但不限于以下事项:
(一)试航过程船舶控制模式;
(二)船舶位置、船艏向、航速、加速度等运动状态;
(三)船舶雷达、电子海图、AIS等航行设备数据;
(四)船舶信号设备的状态;
(五)船舶内外部音视频监控;
(六)船舶内部的报警信号情况;
(七)内外部环境感知的综合分析;
(八)船舶动作指令的发出和执行记录;
(九)远程控制中心的状况及一切与船舶试航相关的动作。
3.4 试航通过的一般要求
除紧急功能测试或人工接管测试外,所有测试项目应完全在既定的船舶自主航行状态或远程控制状态下完成,并达到以下试航通过标准:
(一)所有预设的测试项目全部完成,试航测试达到仿真、模型测试效果。
(二)除特殊需要外,试航期间船上人员没有对船舶自主功能相关的设备或部件进行任何操作。
(三)试航期间遵守试航所在区域的航行规则和国际避碰规则,没有发生违法行为。
(四)除预设测试项目需要外,试航期间无设备和信号故障发生。
3.5 试航具体测试项目标准
根据无人自主船舶的功能特性,参照常规船舶试航的标准文件《海船系泊及航行试验通则》(GB/T 3471-2011)形式,从自主功能实现、自主功能保障等方面出发,本文研究并列出内外部环境状态感知和分析、航行测试、避碰测试等13项试航具体测试项目,如图1中所示。
对于13项试航测试具体项目,每一项都视为一个主题,需要完整考虑,主要包括测试项目总体概述、项目细分、适用情况(完全自主和远程控制船舶)、测试项目场景标准、测试项目记录标准、测试项目通过标准等方面,具体内容详见表2。
表2 具体测试项目标准介绍


受研究范围和能力限制,本文所述内容还有很多考虑不周之处,需要深入思考和完善,欢迎业界人士提出宝贵意见和交流。
参考文献
[1]IMO,水面自主船舶试航暂行导则[M]2019
[2]IMO《自主船舶试航暂行导则》微探[D]智能航运.2021.3
[3]海船系泊及航行试验通则.GB/T 3471-2011
[4]ABS, Guide for Autonomous and Remote Control Functions[M]2021.7
[5]中国船级社,智能船舶检验规范2020[M]2020.3
[6]DNV,Guidelines for autonomous shipping[M]2019.10
[7]智能网联汽车自动驾驶功能测试规程(试行)[M]2018.8
END
供稿▕ 王永更
(东疆海事局蔡家堡海巡执法大队)
编辑▕ 韩畅
审核▕ 沈家强 王玲丽

07-14 来源:中远海运

03-18 来源:信德海事网

05-09 来源:舟山绿色渔业发展有限公司
11-07 来源:田腾龙 世界海运
06-23 来源:信德海事网

03-12 来源:李桢 世界海运

06-24 来源:信德海事网

07-02 来源:信德海事网

07-25 来源:信德海事网

06-20 来源:经济日报