摘要:作为航运业数字化转型和新技术革新的代表,自主船舶正受到广泛关注。为进一步厘清不同自主水平下的“人机等效替代”,明确船舶智能化、船舶自动化与船舶自主化的区别和联系,从15家权威机构或组织发布的船舶自主水平划分标准入手,分析不同划分标准的内涵和实质。分析结果表明,自动化船舶、智能船舶与自主船舶并非线性发展关系,存在本质区别;但从技术手段来说,自动化技术、智能化技术又促进了自主化技术的发展和进步,三者间相互联系、相互融合。
关键词:自主船舶;智能船舶;自动化船舶;自主水平
一、引言
伴随着工业4.0时代的到来,人工智能、云计算、物联网等技术为航运业的数字化转型提供了无限的可能。以安全、数字、绿色、智能为指向的航运产业技术创新业已成为加快产业转型升级、促进新旧动能转换和打造企业核心竞争力的重要支撑。在此背景下,国际海事组织 ( International Maritime Organization, IMO ) 在海上安全委员会 ( Maritime Safety Committee, MSC ) 第98届会议中首次提出海上自主水面船舶 ( Maritime Autonomous Surface Ship, MASS,以下简称自主船舶 ) 的概念,并在MSC 99 ( 海上安全委员会第99届会议,下同 )、MSC 100、MSC 101、MSC 102、MSC 103、MSC 104上对自主船舶进行了深入讨论。2022年4月20日至29日,MSC 105完成了基于目标的自主船舶文书路线图草案,主要包括审议自主船舶文书制定的主要原则、宗旨与目标、范围与结构,对自主船舶术语的共同理解,以及如何解决IMO文书中发现的共同挑战等[1]。
在过去的几年时间里,各国对自主船舶的科研投入显著增加,探索其可行性的研究课题大量启动,已有多个自主船舶的原型在不同授权水域进行了示范测试,并取得了令人欣喜的成果。2022年以来,日本的MEGURI 2040项目已针对自主船舶开展了6次较为深入的试验,涵盖自主避碰、自动靠离泊、自主导航、岸基控制中心 ( Shore Control Centre, SCC ) 应急监测与运营、路径跟踪等内容。德国DB Schenker公司于5月5日宣布将在Ikornnes码头和挪威 Alesund港之间运营一条零排放的沿海集装箱支线,承担营运任务的船舶为一艘自主电动沿海集装箱支线船。6月2日,韩国现代重工旗下子公司Avikus与SK Shipping公司使用自主导航技术HiNAS 2.0实现了世界首次大型LNG运输船的自主导航跨洋航行。同样地,我国也在自主船舶、智能船舶等领域持续发力。4月22日,我国自主研发的智能航行300 TEU集装箱商船“智飞”号在山东港口青岛港前湾港区集装箱码头投入运营。5月18日,隶属于南方海洋科学与工程广东省实验室 ( 珠海 ) 的“珠海云”号智能型无人系统母船在广州下水,为全球首艘智能型无人系统母船。根据相关分析报告,预计到2030年,自主船舶的市场规模将达到142亿美元,其中,2020—2030年的复合年增长率为9.3%[2]。总的来说,作为航运业数字化转型和新技术革新的代表,自主船舶已然成为未来航运的载体,并已成为现阶段全球航运领域的研究热点和发展方向。
就现阶段而言,自主船舶的经济性和所带来环保效益是其发展的动力来源,世界各国已从各个角度进行了卓有成效的探索。有的科研成果虽已得到了工程化应用,但仍主要处于试验测试阶段,相关技术的成熟度、安全性和可靠性还需要进一步验证。为进一步厘清船舶在不同自主水平下能够实现何种形式的“人机等效替代”,明确人在控制环路中发挥的具体作用,本文从当前具有重要影响力的15家权威机构或组织发布的船舶自主水平划分标准入手,分析不同划分标准的内涵和实质,以期明确船舶智能化、船舶自动化与船舶自主化的区别和联系,在一定程度上促进智能船舶、自动化船舶和自主船舶的高质量协同发展。
二、权威机构或组织的船舶自主水平划分标准
( 一 ) IMO的船舶自主水平划分标准
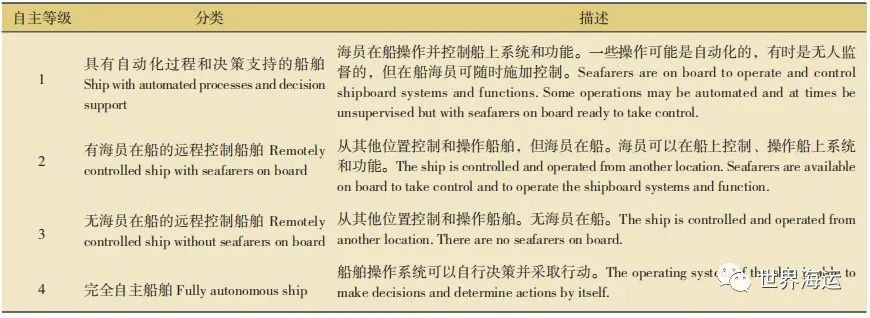
在2018年5月举行的MSC第99届会议上,IMO首次针对自主船舶的自主等级进行了定义,将其划分为具有自动化过程和决策支持的船舶、有海员在船的远程控制船舶、无海员在船的远程控制船舶和完全自主船舶4个等级,同时强调自主船舶可以在单次航程期间以一个或多个自主水平运行,IMO的船舶自主水平划分标准见表1。IMO提出的划分标准将是业界针对自主船舶开展相关研究的主要依据和准则,影响最为广泛。
表1 IMO的船舶自主水平划分标准
( 二 ) 不同船级社的船舶自主水平划分标准
1.劳氏船级社的船舶自主水平划分标准
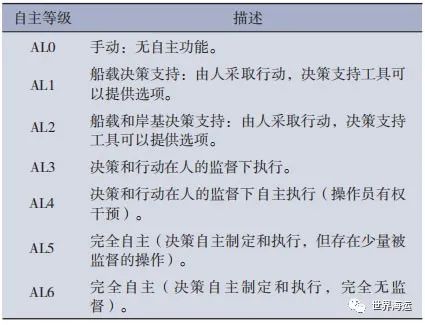
2016年7月8日,劳氏船级社 ( Lloyd’s Register,LR ) 在《ShipRight程序指南》中将船舶的自主水平分为AL0~AL6共7个等级,这是全球权威机构首次对船舶的自主水平进行等级划分,也是自主水平分级领域中的标志性文件[3]。2017年2月,在《ShipRight程序指南》的基础上,LR发布《无人船舶系统规范》,旨在提供一种独特而有价值的保证流程,以证明无人船舶系统的安全设计、建造和维护符合既定的框架。LR的船舶自主水平划分标准见表2。
表2 LR的船舶自主水平划分标准
2.法国船级社的船舶自主水平划分标准
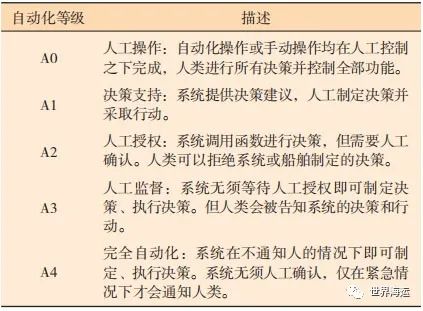
2017年12月,法国船级社 ( Bureau Veritas, BV ) 发布《自主航运指南》,对可用于提高自主船舶 ( 至少500 GT,不包括小型船舶、无人水面艇等 ) 运输自主能力的设计或系统操作提出了相应的建议,并提出了0~4共5个等级的自主水平划分标准。其中,0级为常规船舶,1级为智能船舶,2~4级为自主船舶。2019年10月,BV对该指南进行了更新,将指南的应用范围扩大到了配备自动化系统的船舶及相关的SCC。然而,该版指南使用术语“自动化等级 ( Degree of Automation )”描述从人到系统的决策等级,而非使用上一版指南中的术语“自主水平 ( Level of Autonomy )”表述。2019年版《自主航运指南》将船舶的自动化等级分为A0~A4共5个等级,见表3。其中,A0为人工操作,A4为完全自动化,同时强调术语“自主”仅限于在等级A4中使用,不能用于其他等级。
表3 BV的船舶自动化等级划分标准
3.中国船级社的船舶自主水平划分标准
2018年10月,中国船级社 ( China Classification Society,CCS ) 发布《自主货物运输船舶指南》,旨在为自主货物运输船舶的设计和建造提供依据。在该指南中,CCS采用了IMO对自主船舶的定义来界定自主货物运输船舶,即“在不同程度上可以独立于人员干预运行的船舶”。在此基础上,CCS直接采用了IMO对于船舶自主水平的4级划分,并强调该指南主要用于涵盖自主水平为第3等级和第4等级的船舶技术要求。
4.日本船级社的船舶自主水平划分标准
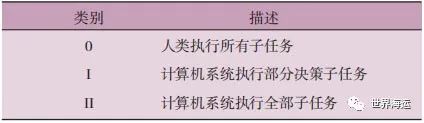
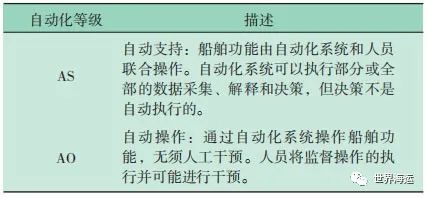
2020年1月,日本船级社 ( ClassNK ) 发布《船舶自动化/自主操作指南》1.0版本,其认为自主船舶的发展方向大致可分为两种:一是以减少船员数量为目的,对无人驾驶船舶和短途小型船舶进行设计和开发;二是针对船上任务的部分自动化或远程支持进行设计和开发。在该指南中,并未直接对船舶的自主水平进行等级划分,而是从系统的设计开发、安装和操作的角度对自动化操作系统 ( Automated Operation Systems,AOS ) 和远程操作系统 ( Remote Operation Systems,ROS ) 进行分类,总体上将自动化类别划分成3类,见表4。
表4 ClassNK对船舶自动化的分类
5.韩国船级社的船舶自主水平划分标准
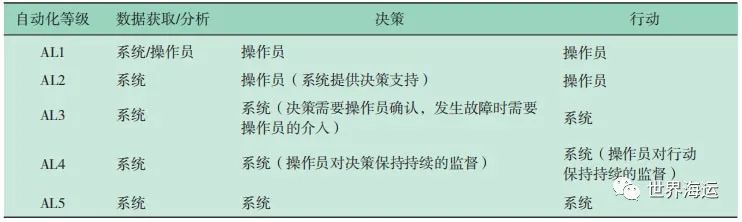
2019年1月,韩国船级社 ( Korean Register,KR ) 发布《自主船舶指南》,并于2020年7月进行了修订,旨在通过风险评估确保自主船舶或自主操作所需的系统和功能的安全性和可靠性。在该指南中,KR根据船舶的数据获取、决策和执行功能对船舶的自主水平进行划分,分为AL1~AL5共5个等级,见表5。当处于AL5时,包括数据获取/分析、决策、行动在内的所有功能均由系统执行,系统可对异常操作场景 ( 系统故障等 ) 做出响应,操作员仅在紧急情况时进行监控。
表5 KR的船舶自主水平等级划分标准
6.俄罗斯船级社的船舶自主水平划分标准
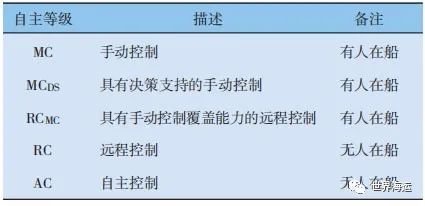
2020年6月,俄罗斯船级社 ( Russian Maritime Register of Shipping,RS ) 发布《海上自主和远程控制水面船舶入级规范》,并于2022年1月修订。该规范明确了自主船舶设计和建造过程中的技术监管要求,同时,对自主船舶进行了分类以表示在开阔水域和受限空间 ( 受限水域、停泊区和港内 ) 中移动时控制船舶的能力,并引入自主等级符号,见表6。在对自主船舶进行分类时,将使用两个符号分别表示自主船舶在开阔水域和受限空间的控制能力。例如,AC-MC表示船舶在开阔水域可自主控制,但在受限水域和港口口门处移动时需要手动控制;RCMC-MCDS表示船舶在开阔水域时可进行远程控制 ( 具有手动控制覆盖能力 ),但在受限水域和港口口门处时仅能进行手动控制 ( 具有决策支持 )。
表6 RS的船舶自主水平划分标准
7.挪威船级社的船舶自主水平划分标准
2021年9月,挪威船级社 ( Det Norske Veritas,DNV ) 发布《自主与远程控制船舶入级指南》的最新修订版,旨在为在自主船舶和/或远程控制船舶中实施新技术提供指导,从而确保其能够达到与常规船舶相当或更高的安全水平。与其他船级社的划分原则不同,在该入级指南中,DNV将自主或远程控制视为实现某些功能和任务的手段,基于功能所使用环境的不同,从而确定相应的自主水平。本文以代表性的航行功能 ( navigation function ) 和船舶工程功能 ( vessel engineering function ) 为例,对其自主水平进行描述。针对航行功能,DNV将其自主水平划分为5个等级,见表7。与航行功能不同,DNV针对船舶工程功能的分类较为简单,主要从自动化的角度对其进行定义,见表8。
表7 DNV对船舶航行功能的自主水平划分标准
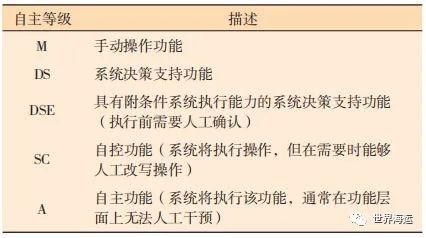
表8 DNV对船舶工程功能的自动化等级划分标准
8.美国船级社的船舶自主水平划分标准
2021年7月和2022年2月,美国船级社 ( American Bureau of Shipping,ABS ) 相继发布了《自主和远程控制功能指南》和《自主船舶白皮书》,为自主船舶制定了一个基于目标的设计和运营框架,以支持安全创新和自主化技术的应用。在《自主和远程控制功能指南》中,ABS基于数据处理、决策和执行过程中的人机交互水平将自主水平划分为4个等级,见表9,并认为自主船舶的发展要经历智能、半自主直至全自主,即认为自主是智能的高级形式。
表9 ABS的船舶自主水平划分标准

9.印度船级社的船舶自主水平划分标准
2021年12月,印度船级社 ( Indian Register of Shipping,IRClass ) 发布《远程操作船舶和自主水面船舶指南》,旨在为远程控制船舶和自主水面船舶的安全操作提供指导并提出相应的要求。在该指南中,IRClass直接采用了IMO在MSC.1/Circ.1638中对于船舶自主等级的分类,即将其分为具有自动化过程和决策支持的船舶、有海员在船的远程控制船舶、无海员在船的远程控制船舶和完全自主船舶。
( 三 ) 其他组织或机构的船舶自主水平划分标准
1.挪威自主船舶论坛的船舶自主水平划分标准
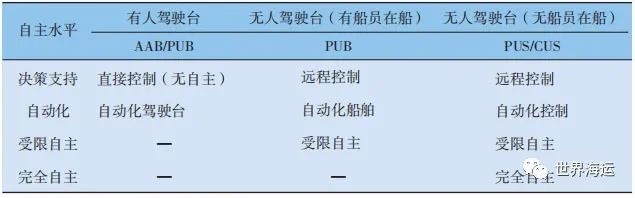
2017年10月10日,挪威自主船舶论坛 ( Norwegian Forum for Autonomous Ships,NFAS ) 在其经批准的第一个公开版本中,将自主船舶分为自主辅助驾驶台 ( Autonomy Assisted Bridge,AAB )、定期无人驾驶台 ( Periodically Unmanned Bridge,PUB )、定期无人驾驶船舶 ( Periodically Unmanned Ship,PUS ) 和持续无人驾驶船舶 ( Continuously Unmanned Ship,CUS ) 4类,见表10。同时,自主船舶的操作自主水平被分为决策支持、自动化、受限自主和完全自主4个等级,见表11。在此基础上,NFAS定义了6种自主水平,分别面向有人驾驶台和无人驾驶台,见表12。
表10 NFAS对自主船舶的分类
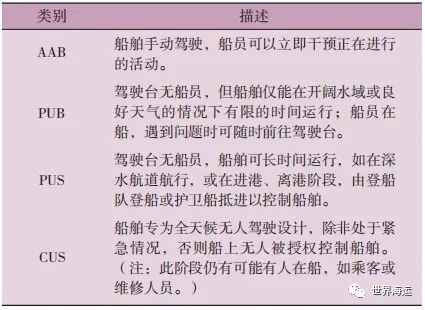
表11 NFAS的操作自主水平划分标准

表12 NFAS的船舶自主水平划分标准
2.丹麦海事局的船舶自主水平划分标准
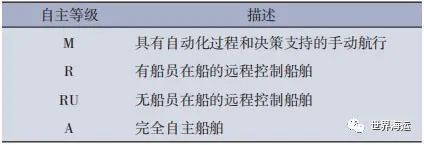
丹麦海事局 ( Danish Maritime Authority, DMA ) 在其2017年提交给IMO的有关监管障碍的分析报告中,将船舶的自主水平划分为M、R、RU和A共4个等级,并详细阐述了在不同自主水平下船舶操作员的角色内容,见表13。该标准在一定程度上参考了LR自主水平划分标准,其中,A级与AL6级均表明系统已经具备自主决策、行动和对周围船舶交通行为进行预测的能力,如果系统出现故障或提示人为干预,则由岸基控制人员参与决策。
表13 DMA的船舶自主水平划分标准
3.英国海上自主系统监管工作组的船舶自主水平划分标准
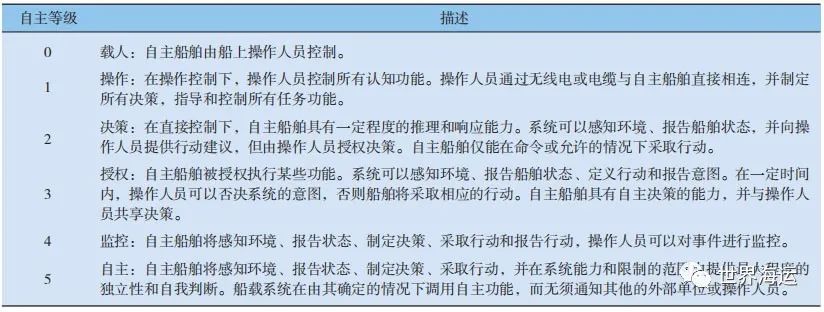
2014年9月,由英国政府出资成立了海上自主系统监管工作组 ( Maritime Autonomous Systems Regulatory Working Group,MASRWG ),该工作组的主要职责在于识别和确认现行IMO监管体系中与海上自主系统运行有关的问题,并提出相应的解决方法。2017年11月,MASRWG首次发布《自主船舶行业行为守则和实践规范》( 以下简称《行为守则》),旨在为24 m以下的自主和半自主船舶的设计、建造和安全操作提供实用指南,同时制定更详细的自主船舶监管框架。随后,在2018年11月、2019年11月和2020年12月,MASRWG相继发布了该《行为守则》的2.0版本、3.0版本和4.0版本。在最新版本中,MASRWG从控制能力的角度将自主船舶的自主水平分为0~5共6个等级,见表14。
表14 MASRWG的船舶自主水平划分标准
4.莱茵河航行中央委员会的船舶自主水平划分标准
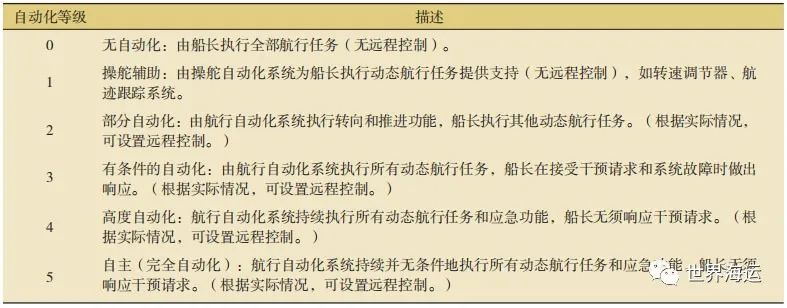
1816年成立的莱茵河航行中央委员会 ( Central Commission for the Navigation on the Rhine,CCNR ) 现有5个成员国,分别为德国、比利时、法国、荷兰和瑞士,其主要职责是制定和修改有关莱茵河航运有关的规定,以保障莱茵河的环境和航运安全。2018年12月,CCNR通过了国际上第一个关于内河航行自动化水平的定义,其将自主等同于完全自动化,并划分为0~5共6个等级,见表15。
表15 CCNR的船舶自动化等级划分标准
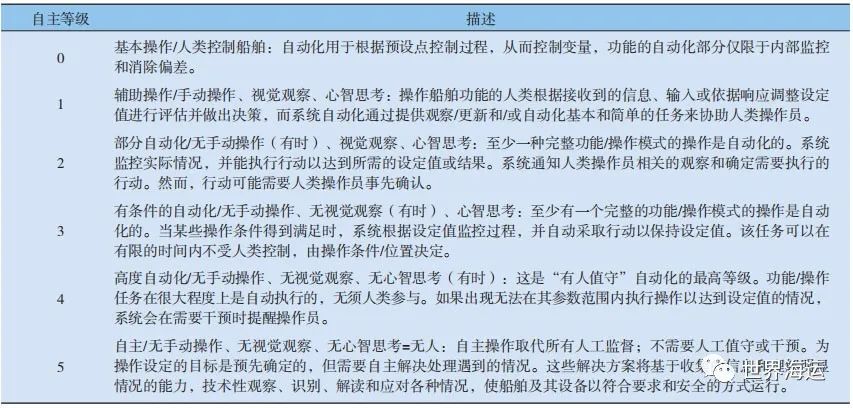
2016年,One Sea自主海上生态系统联盟 ( 简称One Sea ) 成立,作为一家专注于自主船舶的泛行业全球联盟,目前共有康士伯、瓦锡兰等十余家成员单位,其目标是在2025年前带来一个经过充分研究、测验并具有实力的自主航运网络。2022年3月,One Sea发布了一份名为《自主船舶:规则制定参考术语》的白皮书,旨在为开发和实施自主船舶的国际监管框架提供一条前进路线。在该白皮书中,将船舶自主水平划分为0~5共6个等级,见表16。其中,自主被视为最高等级的自动化。同时,该白皮书强调,船舶自主水平的划分不应与人员所处的位置和船舶配员水平混淆,应根据人类的关注度和参与度的需求来定义。
表16 One Sea的船舶自主水平划分标准
三、船舶自主水平划分标准评析
通过对以上15家机构或组织的船舶自主水平划分标准的梳理可知,目前所公布的船舶自主水平划分标准总体上可分为4种主要类别,不同类别的划分方法和思路各有不同,下面将对其进行逐一分析和评述。
( 一 ) 基于框架的船舶自主水平划分标准
在该类别中,共有5家机构或组织直接采用或基本采用了IMO所提出的4级自主水平划分标准,包括IMO、CCS、RS、IRClass、DMA。其中,CCS和IRClass直接采用了该划分标准,而RS则在该划分标准的基础上作了进一步的细化,由4个等级扩展为5个等级。在该类别的船舶自主水平划分标准中,主要描述了对船舶自主水平的总体分类,并表明了处于不同自主水平时人员的配备情况和人员所处位置,但并未对具体的功能和操作进行拆解,是一种框架式的自主水平划分标准。值得注意的是,尽管该划分标准较为粗略,但由于IMO的最高权威性使得其必然成为开展自主船舶相关研究的主要依据和准则,影响最为广泛。同时,IMO提出该划分标准的目的是用于监管范围界定工作的顺利开展,而框架式的划分有助于各成员国根据本国自身发展的实际情况提出更为详尽的自主水平划分标准,起到重要的指导作用。
( 二 ) 基于功能或操作的船舶自主水平划分标准
在该类别中,以LR提出的船舶自主水平划分标准为典型代表,还包括DNV、KR、NFAS和MASRWG,共有5家机构或组织。相比于IMO提出的船舶自主水平划分标准,此种划分标准更为细致,主要以特定的功能或操作为对象,对其自主水平进行划分,覆盖手动操作到完全自主。例如,将船舶功能分成数据获取和分析 ( 环境感知 )、制定决策、采取行动等阶段,并在各阶段详细描述了不同自主等级下系统和人类的任务或职责,以及不同特定情景下人机交互的内容和形式。除直接采用IMO提出的分类标准外,基于该方法制定的自主水平划分标准占据着重要地位,其思路也影响着其他船舶自主水平划分方法。从航海实践的角度来说,该类别的船舶自主水平划分标准从特定、具体的功能或操作出发,详细地阐明了处于不同自主水平时系统可实现哪些功能或操作的替代,能够较好地回答船舶驾驶人员的关切,实际应用价值更高、实践性更强。
( 三 ) 基于智能到自主的船舶自主水平划分标准
在该类别中,自主被视为智能的高级形式,船舶自主水平的发展需要经过手动、智能、半自主和自主等4个阶段。区别在于,智能仅能满足由系统进行监控和分析,而不能进行决策和行动。智能系统主要通过在监控和分析阶段提供相应的支持以实现人类能力的增强,并不直接制定决策。目前,在15家组织或机构中,仅有ABS使用了该方法对船舶的自主水平进行划分。由此可见,基于该方法的船舶自主水平划分标准并未被广泛接受,同时,智能与自主存在本质区别,能否划归于 统一范畴,存在一定的争议。
( 四 ) 基于自动化到自主的船舶自主水平划分标准
该类别的划分标准将自主与自动化等同起来,使用自动化等级定义自主水平,其中,自主被视为最高等级的自动化。在上述15家组织或机构中,共有4家采用该方法对船舶的自主水平进行划分,包括BV、ClassNK、CCNR和One Sea,其中以BV和One Sea为典型代表。受到基于功能或操作的船舶自主水平划分方法的影响,在对于自动化的等级划分中也考虑并明确了系统和人类在不同功能和操作中扮演的角色。在该类别的划分标准中,主要依据自动化等级进行划分,力求证明船舶自动化水平越高则自主水平越高,完全自动化被等同于自主。尽管有4家组织或机构采用该思路制定了相应的分级标准,在相关研究中占据一席之地,但从本质上来说,自主与自动化存在显著差异,其对于船舶系统的本质要求不具有相同的逻辑关系。船舶的自动化水平高,说明船舶的设备、系统或过程控制可以根据人的要求,准确地实现预设目标,但仍需要人的监控、授权和批准[3]。无论何种等级的自动化均不具有“独立于人的干预”自主完成任务或实现功能的能力,仅可以作为预设范围内船员或岸基操作人员信息获取和分析、制定决策、采取行动时的辅助和增强。
四、船舶智能化、自动化与自主化的区别与联系
根据对以上不同类别船舶自主水平划分标准的分析结果可知,不同类别的划分标准采用的划分方法和思路存在明显不同,特别是基于智能到自主的船舶自主水平划分标准和基于自动化到自主的船舶自主水平划分标准。这两类自主水平的划分标准将智能与自主、自动化与自主划归到同一范畴,认为自主是智能的高级形式、自主等同于完全自动化。然而,从船舶自主化、船舶智能化和船舶自动化的角度来说,这三者间存在本质区别。
( 一 ) 船舶智能化与船舶自主化
2017年,IMO在MSC 99上对自主船舶的定义进行了界定,自主船舶系指“在不同程度上,可以独立于人的干预而运行的船舶”[3]。2015年和2020年,CCS在其发布的《智能船舶规范》和《智能船舶规范 ( 2020年 )》中对智能船舶进行了定义,即“智能船舶系指利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据,并基于计算机技术、自动控制技术和大数据处理和分析技术,在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶,以使船舶更加安全、更加环保、更加经济和更加高效”。
从智能船舶的定义上看,智能船舶的本质即“船舶智能化”。根据CCS的定义,智能化系指由现代通信与信息技术、计算机网络技术、智能控制技术等汇集而成的针对某个对象的应用,这些应用通常包括但不限于评估、诊断、预测和决策等。从这个定义可以看出,智能是一个涵盖一系列技术的统称,包括数字化和新技术、节能和绿色运营、创新和可持续的解决方案等。与火车、汽车等运载平台不同,船舶具有单个资产规模大、装备系统复杂、航行环境多变、安全保障要求高等特点。因此,智能船舶技术将包括船舶设计、船舶制造和船舶装备,并与智能港口、智能航运、智慧海事等技术紧密相关。因此,船舶智能化的根本目的并不是追求“无人”,而应是专注于支持数字能力的技术和解决方案,通过应用相关和可用的解决方案来优化船舶整个生命周期的性能,进一步提高组织和决策效率、提高船舶性能、降低运营成本,从而实现来自运营者/船东、设计建造者、各服务和支持方以及监管机构对安全可靠性、经济性、环保性、便利性及可持续性的追求,最终推动船舶产业的数字化转型和智能化升级。
与智能化不同,自主化主要用于描述工程系统在执行不同任务时自行决定其行为而无须外部系统或人员参与的能力,其表达的是行为方式。从IMO对自主船舶的定义来看,自主船舶或船舶自主化强调的是船舶能够独立于人的干预而运行,包括自主感知、自主决策和自主行动,最终目的是实现系统对人的等效替代。
由此可见,从某种程度上来说,智能船舶与自主船舶并不是线性发展的关系,而是两个不同范畴的概念,其代表了船舶领域数字化发展的两个不同维度。
( 二 ) 船舶自动化与船舶自主化
对于自动化船舶来说,其早在20世纪50年代便得以蓬勃发展,大致可分为单元自动化、机舱自动化、全船自动化3个主要阶段,其相关技术始于机舱设备的自动控制,由机舱自动化发展至航行自动化、货物装卸自动化、锚泊及动力定位自动化,直至形成集成船舶管理系统。目前,自动舵、电站自动控制系统、液货装卸自动化系统等系统已经较为成熟并得到了广泛应用。
为了更好地理解船舶自动化与船舶自主化的区别,需要从这两种技术的工作原理入手进行分析。“自动化 ( automated )”一般是被用于过程的通用语言,意为通过多种信息化手段使船舶能够在无人控制的情况下进行某些操作,其名词形式 “automation”主要用于描述机械工作过程中对计算机指令的响应能力,是已预设的决策和控制程序,系统无须根据实际情况以任何不同的方式进行选择。也就是说,自动化的核心在于通过机械或电子设备替代人工对设备、过程或系统进行自动控制和操作。但上述任务必须是在预定条件下的常规或重复性任务,即外部触发输入必须处于预设的边界条件之内,系统才能自动判断,并执行相应的功能指令。相同的边界条件下,功能指令执行相同。然而,自动化系统中的预设命令主要源于人类的历史经验,即将人类经验转化为边界条件并在系统中进行预设。当系统功能较为复杂或现有的人类经验不能覆盖新的任务场景时,自动化技术则难以满足保障船舶安全的基本需求。
反观自主化系统,其一般不进行边界条件的预设,不仅可以执行预定义的动作,还可以结合其他条件的态势感知和机器学习的经验对外部触发进行判断,进而生成决策和控制方案。同时,系统能够自适应环境条件,并在最佳或最适合的选项中进行自主选择,而不受预设的边界条件或外部控制的影响。因此,自主船舶之所以被称为“自主”,主要体现在人的控制行为或其发挥的作用将逐步由系统自主完成,船舶会像人 ( 船员 ) 一样能感知、能思考、能决策、能行动等,即船舶自主化技术的核心是实现船舶控制的“人机等效替代”。船舶自主化系统与人类对于特定事件的处理流程类似,主要分为信息采集、信息分析、决策和行动选择、行动实 施等4个阶段,分别位于自主化系统架构的感知层、决策层和控制层,如图1所示。其中,感知层包括信息采集和信息分析,基于传感器感知和/或人类感知采集相关信息,并对获取的有效信息分析、融合、解释为态势理解,从而为决策层提供信息输入;决策层利用训练数据库和推理算法,同时根据感知层输入的信息制定决策,并将系统性能保持在适用框架内;控制层根据生成的执行方案控制船舶,以实现控制参数的调整。感知层和决策层将主要依靠自主化技术实现,而控制层一般采用自动化技术即可实现,与基于现有技术的传统系统差异不大。
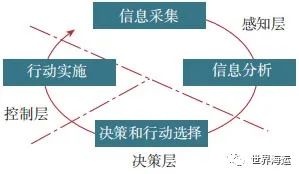
图1 船舶自主化系统架构
因此,船舶自动化与船舶自主化存在着本质区别,如图2所示。但从技术应用的角度来说,自动化技术仍可以在自主化系统中发挥重要作用,使得高级自动化系统可以具有自主化的外观,即在预设的边界条件内或预定范围内,任务或功能可以通过自动化技术实现,然而一旦超出预定范围,则需要自主化技术的介入,由系统进行自主决策和行动选择。
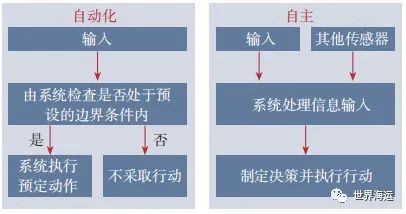
图2 船舶自动化与船舶自主化的区别
综上所述,自主船舶、智能船舶、自动化船舶的概念、构想、目的和发展路线各不相同,却又相互联系。从本质与内涵出发,船舶自主化、船舶智能化和船舶自动化分别从不同维度表征了船舶的行为方式和完成行为过程的能力,其最大差异体现在人在控制环路中发挥的作用。但从技术手段上来说,自动化技术、智能化技术又可以促进自主化技术的发展,三者间相互联系、相互融合。以制定决策和行动选择阶段为例,在系统预设的边界条件内,可采用自动化技术;而在系统预设的边界条件之外,则可利用智能技术提供一整套的决策或行动备选方案,以供人类选择;或采用自主化技术独立于人的干预自主决策并采取行动。
五、结语
近年来,将以更为安全、高效、绿色的方式运载货物和乘客的自主船舶正受到航运领域研究机构、学者的广泛关注,业已成为航运业数字化转型和新技术革新的典型代表。众多机构或组织对于自主船舶进行了大量有益探索,部分研究成果已取得突破性进展,同时针对船舶自主水平提出了不同的划分标准。然而,不同划分标准的背后彰显着不同的划分思路,尤其是对于船舶智能化、船舶自动化与船舶自主化的理解各异,三者间的区别和联系辨识不清。
本文通过梳理全球范围内15家权威组织或机构的船舶自主水平划分标准,将其划分为4个主要类别,并逐一评析其划分方法和思路。分析结果表明,自动化船舶、智能船舶与自主船舶并非是线性 发展的关系,存在本质区别,不应将其混淆或划归到同一范畴。但从所采用的技术手段来说,自动化技术、智能技术又促进了自主化技术,乃至自主船舶的发展和进步。在厘清船舶智能化、船舶自动化与船舶自主化的同时,本文的研究结论在一定程度上可为我国航海教育面向船舶自主化进行的适应性调整提供参考。
参考文献:
[1] 韩佳霖.国际海事组织海上安全委员会第105届会议简报 [J].世界海运,2022(6):1-4.
[2]MARKETSANDMARKETS.Autonomousshipsmarketbyautonomy(fullyautonomous,remoteoperations,partialautomation),shiptype(commercial,defense),enduse(linefit,retrofit),solution(systems,software,structures),andregion-globalforecastto 2030[R].Pune:MarketsandMarkets,2019.
[3] 周翔宇,吴兆麟,王凤武,等.自主船舶的定义及其自主水平的界定[J].交通运输工程学报,2019(6):149-162.
作者简介:
周翔宇,大连海事大学航海学院,博士,讲师。
杨 雪,大连海事大学航海学院,博士,副教授。
费珊珊,大连海事大学航海学院,助理研究员。
*中央高校基本科研业务费专项资金资助,项目编号:3132022132。
本文刊发于《世界海运》2022年第9期,转发须注明作者和原文出处。

03-16 来源:石珣 中国船检
05-16 来源:陈维工作室 浦东海事
10-08 来源:连云港海事

08-26 来源:柴悝旎 中远保险经纪
09-08 来源:Capt.Jin 我的航海世界
07-15 来源:青岛海事

03-13 来源:中华人民共和国海事局
01-11 来源:航运运价交易SSEFC

01-04 来源:青岛海事

11-04 来源: 海事综合服务平台