有话大家谈:
VLOC/VLCC在大角度转弯时提前量(WOL施舵线)多少合适?
电子海图转弯半径设置是否都是0.5NM?多少合适?

网络图片、仅作示意
0 目前外部机构(PSC、船籍国、大油公司等等)检查越来越专业,越来越细,提出的问题也越来越专业和具体,给我们同行们如何解释增加难度,专业性越来越强,如何解释比较合理?比如说:WOL如何确定?等等。也有些驾驶员、船长同笔者探讨:大角度弯提前量(WOL)多少合适, 如何确定?电子海图有关转弯半径R、Reach设置多少合理呢?有不少驾驶员说基本上都是设置0.5NM(大约1000米),那是不是合适呢?与哪些因数有关呢?笔者想利用贵平台,于同行们共同探讨,有话大家谈!目的就一条:确保航行安全、弄明白其中的道理。
1.0什么是WOL(施舵线)呢?参图(1)
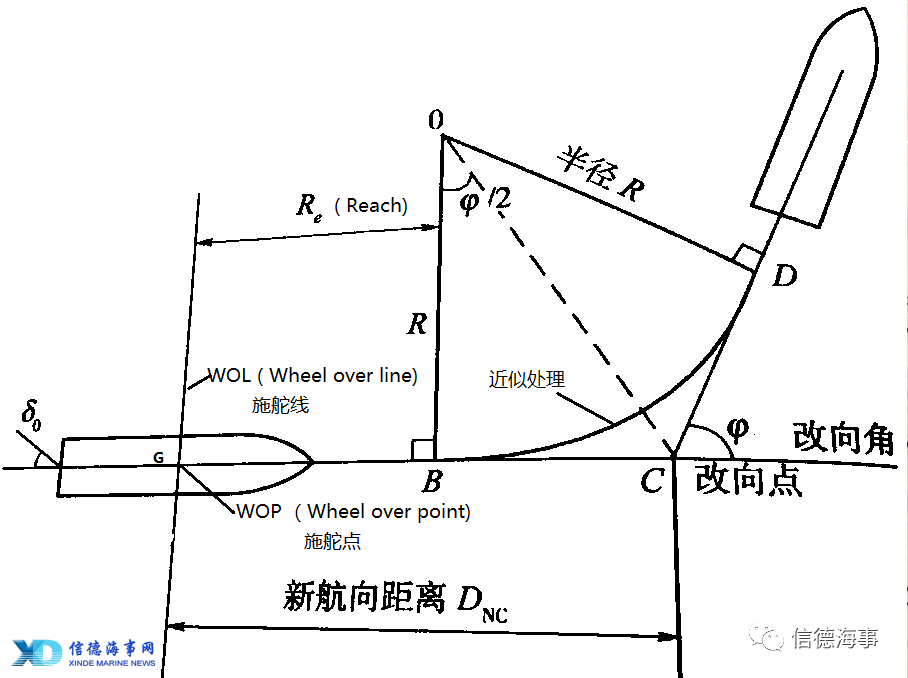
图1:WOL示意图
船舶在转向时,往一舷操一个转舵角δ0后,船舶由于惯性并不会立即转向,而是保持原来的航向航行一段距离如GB(参图(1)、图(2)),这段距离近似直线运动,然后才开始作圆弧(近似)运动,参图(1)、图(2),最后才转到新航向,在计划航线上,往一舷操舵时,该点为施舵点,以此点画一条垂直航线的直线,该线为施舵线(WOL)。船舶在航行时,有可能受到外界因素的影响,不可避免的偏离计划航线,只要到达WOL时就要准备转向,在实际操作时,还要考虑到当时的风、流、船舶动态等等外界因素,适当提前或推迟转向。
1.1转到新航向距离确定。如果先不考虑外界
因素的影响,船舶转向时,如何才能确保船舶按照预定的计划转到新航线上去呢?从图(1)和图(2)可以看出,要想船舶按照预定的计划转到新航向上去,就要有适当的提前量DNC = GC。从图(2),得出转到新航向的距离DNC分2段,即:DNC =GB + BC。
1.2如何确定转到新航向的提前量呢?提前量与那些因素有关呢?【1】参图(2)
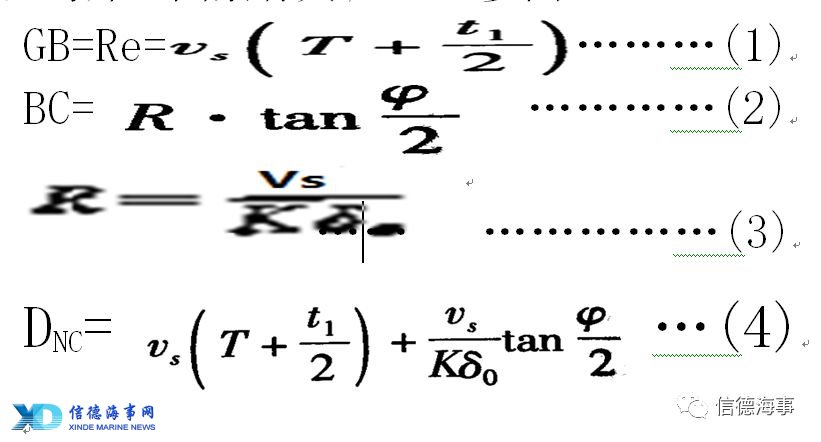
从上述公式中可以得出提前量DNC与船舶操纵特性、船型、装载状态、速度、施舵角、施舵时间等有关,当然外界因素(风、流、水深等)也有关系,为了讨论方便,先不考虑外界因素的影响,以下的讨论都不考虑外界因素的影响。
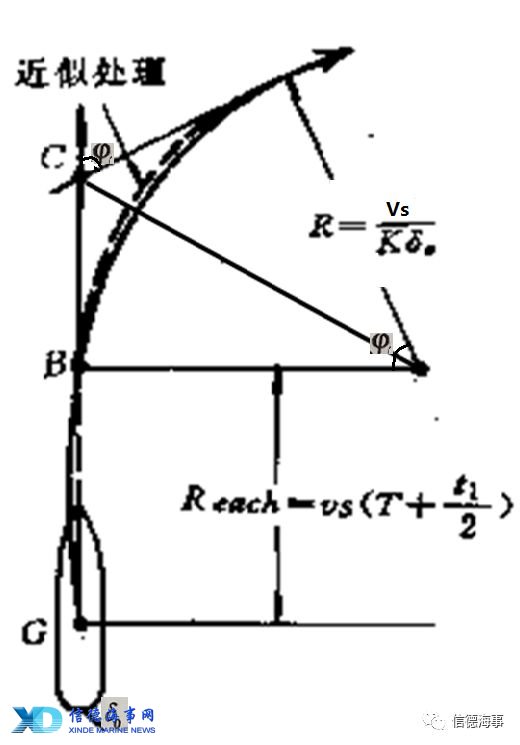
图2 确定WOL的因素(无风流影响)
1.3经验交流,近似经验公式,有话大家谈。
从公式(4)中,可以得知:确定WOL提前量与当时的船速Vs、K、T、转向角、操舵角、操舵时间等等有关。我们在实际工作中按照这个公式来计算DNC,太复杂了,很少有人这样计算,除非有电脑设置这样的程式。那我们能否找出一个简单的经验公式呢?
笔者总结26年的航海经验,得出一个近似经验公式,与同行们讨论其可行性并到实际操船中去进一步验证,如果有不同意见的话,有话大家谈。(请在文末留言,或给信德海事网来函:media@xindemarine.com)
1.3.1旋回要素简单回顾。
在讨论的经验公式之前,我们一起来简单回顾一下船舶的重要特性之一的旋回要素,参图(3)船舶旋回要素。大家都是航海出身,对船舶旋回要素以及对诸要素影响的因素都十分熟悉,限于篇幅这里就不累述,只是列举各要素的经验值【1】供同行们参考(参表一)。在这里笔者想着重提一下,船舶在旋回的过程中,船速度Vs的变化和转头率ROT的变化,下面交流讨论会提到它们及滞距Re(Reach)等。
在到定常旋回之前,船舶在旋回的过程中速度Vs是减少的,转头率ROT的变化是从0开始增大的,到定常旋回时几乎稳定下来不变了。那什么时候船舶进入定常旋回状态呢?不同船型、不同装载状态不同而不同,满载时船头转过100o ~ 200o左右,空载一般船首转到60o左右,进入定常旋回,还有跟船型等有关或提前或推迟。
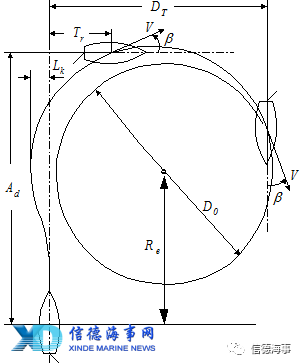
图3 船舶旋回圈示意图
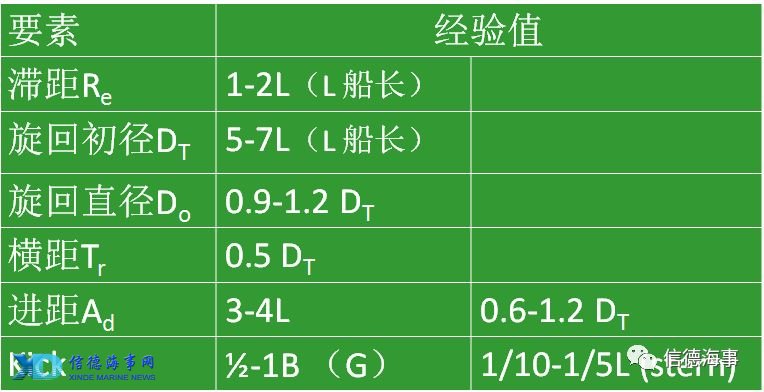
表一 旋回要素经验值
1.3.2如何确定提前量DNC?(DNC =GB + BC)
前面一段GB段很好理解(参公式(1)),由于船舶惯性,船舶施一个舵角到船舶开始旋回改变航向,是船舶改变航向时船舶重心的滞后距离,与船舶当时的速度、装载状态(排水量、吃水等)、操舵时间有关系,可以近似以该速度和装载状态船舶滞距Re来替代(但是两者的概念不同),则GB=Re,一般取1-2倍船长,速度越大GB越大,排水量越大GB越大,VLOC/VLCC由于其排水量大,因而GB相对来说比较大,操舵时间越长GB越大。具体选取多少倍船长可以根据当时的船舶速度和装载状态(排水量)等来定。
现在关键是如何确定BC段,从B点开始作近似圆弧运动,直到最后转到新航线上。从公式(2)可以看出,BC段距离与转弯半径成正比,与转向角的正切成正比。确定BC段距离的关键就是转弯半径R的确定,只有确定了转弯半径R后,才可以确定BC的距离。
1.3.3转弯半径R又有哪些因数有关呢?参公式(3),转弯半径与当时的速度Vs成正比,与旋回指数K和操舵舵角成反比。转弯半径在非受限水域和受限水域有所不同。
1.3.3.1非受限水域。在大海上,航线左右都没有任何障碍物,水深足够,完全可以满足按照条件计算出转弯半径,也可以以当时的速度和装载状况下的旋回半径值来代替。但是如果在狭水道呢?在航线周围有浅点、障碍物呢?哪又如何来确定转弯半径呢?
1.3.3.2 受限水域转弯半径如何确定?比如狭水道。
参图(4),假设下一个航向向右转,转向角φc在C点转向,设置左右偏航距离XTD, 新航向向右转,XTD在F点相交,这样可以找出一个最大的转弯半径R max。在旧航向GC和新航线CE之间作一个内切圆相交F点,如图(4)的虚线所示的弧BFE,此时的内切圆半径虚线所示为这段航线的最大转弯半径Rmax , 得出这个航段的最大提前量:
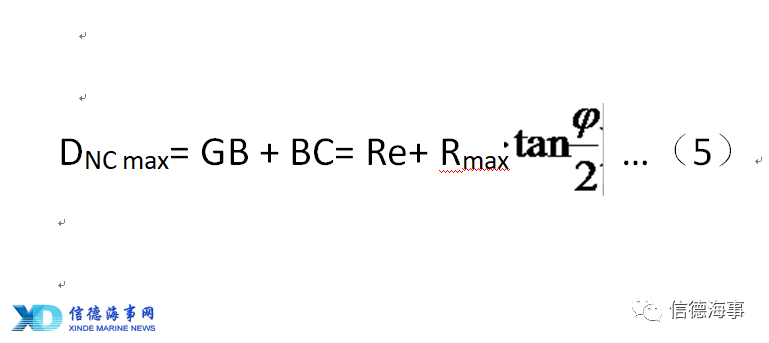
则可以得出最大的WOL (Max),参图(4)。如果在WOL (Max)位置开始转向施舵,是危险的,不安全。
1.3.3.2.1狭水道比较合适的转弯半径如何确定呢?怎样找到这段航线比较合适的转弯半径呢?
从图(4)可以得出,只要在CF之间这个范围任何位置画一个内切圆,在这个范围内通过都是安全的。那如何找一个比较合适的转弯半径呢?我们可以画出一个内切圆通过F’点(CF/2位置处),如图(4)细实线弧B’F’C’,得出的半径为比较合适的转弯半径R best,则可以得出比较合适的提前量:
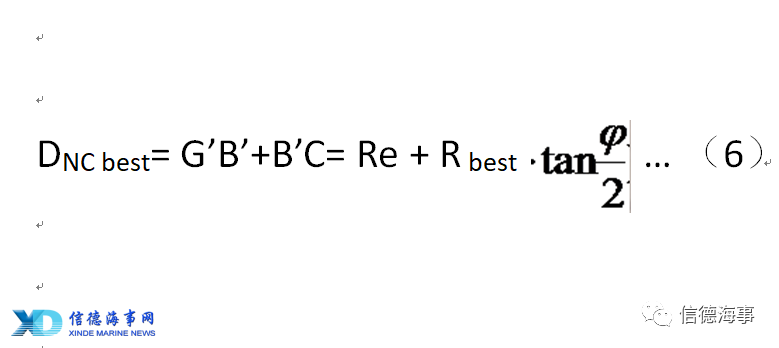
则可以得出比较合适的WOL best,如图(4)。只要船在WOL best处施舵就是安全的,即使受到外界因素的影响,也会在弧B’F’E’或左或右通过,适时考虑外界因素的影响,可以适当提前或推迟施舵,确保安全。
图(4)WOL确定示意图
2.0 电子海图转弯半径参数R、Re如何设置呢?多少比较合适呢?
现在以TK为例,参图(5) 红线圈所示。 电子海图Re和转弯半径R值到底设置多少合理呢?有些驾驶员在航线设计时,每一段,不管航向角改变多少,也不管在狭水道还是在大洋航行都设置Re 为2倍船长,转弯半径设置为1000米(约0.5海里)。这样设置我认为不合理。关于Re 一般设置为1-2倍船长,速度越大、排水量越大(满载)应该设置大些,速度小(比如低速航行)、空载设置值稍微小些,VLOC/VLCC相对来说适当设置大些。
Re、 转弯半径R设置多少比较合适?首先要明白其中的道理。在1.3.2和1.3.3中讨论过,在电子海图转弯半径设置为R best为比较好。应该根据每一段实际情况,得出每一段的R best,每一段的转弯半径应该设置每一段的R best 比较合理。
总之,在设置Re 和转弯半径R的时候,始终把安全放在第一位,设置合理的Re 和合适的转弯半径R,这样得出来的WOL就是合适的。
图(5)电子海图(TK)设置
3.0 近似经验公式验证、讨论。
从公式(6)可以看出,虽然已经是很简化了,但是还有一个正切函数在那里,计算不是很方便,我们是否可以简化呢?需要我们来进一步讨论、交流,实际操船转向角度为5-10度时,都很好操作,很快转到新航向上,没问题。如果大角度转向时,特别是转向角大于20度以上的角度的急弯时,就需要小心应付,特别是在转向点附近有浅点、障碍物时,更应该小心谨慎,安全始终放在第一位。
在航海实践中,是否进一步简化呢?需要同行们在实际操船中来验证,笔者总结几十年的经验,现在与同行们交流。为了简化把转向角φc都视为90度,根据不同的XTD事先求出R max 和R best。参图(6)这样我们的得出更简单的经验公式:
DNC max = Re + Rmax = (1-2) L + R max …(7)
DNC best = Re + R best =(1-2)L + Rbest …(8)
笔者在实际工作中验证公式(7、8)基本上符合安全需要,请同行们进一步验证。关于XTD的设定根据不同可航水域来确定,安全始终放在第一位。
图(6)改向角φc为90度的WOL
3.1 转弯半径R、转头率ROT、速度Vs的关系。
通过上述的讨论,我们可以找到最合适的WOL best,如果在理想的状况下,没有外界因素的影响,船舶到按照事先计划得出的WOL best时,按照所计划速度、舵角在理想的情况下能否按照如图(4)中沿着弧G’B’F’E’这样的轨迹运动呢?答案是否定的。
先来看看转弯半径、速度和转头率的关系:
ROT=0.96 Vs/R …………………….….. (9)
在1.3.1中笔者提及速度Vs和转头率ROT在船舶旋回过程中的变化,在定常旋回之前,船在旋回过程中Vs速度是减少的,ROT转头率是增大的。从公式(9)中得出,船舶在旋回过程中(定常旋回之前),ROT增大,Vs速度减少,则R减少,那就很容易得出,就是理想状态,就是按照事先计划,也很难按照理想的轨迹弧G’B’F’E运动。
所以在实际大角度转向,特别是惯性比较大的VLOC/VLCC 要事先按照计划的速度、改向角、事先得出适合的ROT值,通过用车、舵来调整,特别是大角度转弯,连续观测ROT,使得ROT始终保持在事先计算出的ROT值附近,由于转向旋回运动使得速度减少,导致舵效不好,可以通过短时用车来增加舵效,适时使用车、舵配合,确保航行安全,顺利过弯。
参考文献资料
注[1]:中华人民共和国海船船员培训合格考试培训教材,大型船舶操纵,2012年

免责声明:本文仅代表作者个人观点,与信德海事无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
投稿或联系信德海事:
admin@xindemarine.com


04-04 来源:信德海事网

11-24 来源:信德海事网

11-14 来源:信德海事网
12-16 来源:信德海事网


