电子海图使用“DR”方式之浅见
巩建辉
为了保证船舶安全,航海人员需尽一切可能随时知道自己的船位,根据船位所处的周围水域的航行条件,采取适合当时环境及情况的航行措施以确保安全航行。而确定航行中船舶的船位的方法,一般分为 推算和 定位两种。本篇文章主要讨论航迹推算在实际操作中的一些浅显认识。
理论探讨:
首先要明白航迹推算是根据航向、航程和风流资料,不借助外界物标或航标推算出有一定精度的船舶航迹和船位的方法。其 推算起始点必须是准确的观测船位,且其航迹推算的起点、 终点应记入航海日志。
航迹推算包括航迹绘算和航迹计算,而航迹绘算就是我们所说的 “海图作业法”。海图作业法简单、直观,可以根据船舶航行时的真航向、航程和风流要素,在海图上绘画出推算航迹和 推算船位 (estimated position EP);
而在无风流情况下的航迹绘算就是在海图上由推算起点画出计划航线即真航向线,在其上以计程仪航程或(航速与航时之积)为推算航程截得的点,此点即称为 积算船位(dead reckoning position DR)。
此处推算船位(estimated position EP)和积算船位(dead reckoning position DR)的定义来自由 郭禹主编的1996年北京.人民交通出版社出版的 《航海学》,也就是我们上学时候学的课本。
接下来看关于上述两个定义的另一种解释:英、美等许多国家采用 不计风和流的航迹推算作为海图作业的基础,所得船位称之为 积算船位DR;
对风和流的影响加以修正后所得船位为 估算船位EP。此定义出自百度百科见下图:

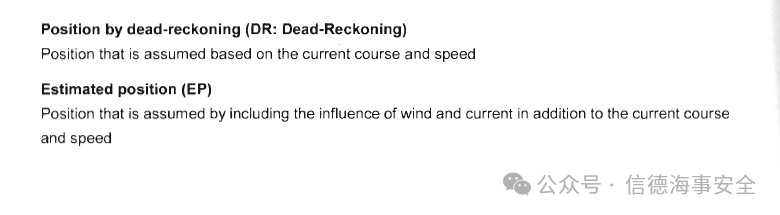
接着再看来自于我们大家都熟悉的 JRC电子海图使用说明书对这对概念的定义(EP:estimated position )和(DR:dead reckoning position )
DR:dead reckoning
Position that is assumed based on the current course and speed
EP: estimated position
Position that is assumed by including the influence of wind and current in addition to the course and speed
见下图:
这样看来使用 DR时要基于流向和流速(这与航海学课本及百度百科的定义有冲突),而使用EP时要考虑风的影响同时加上流速和流向(这个定义没问题,但EP要翻译成推算船位来自郭禹主编的1996年北京.人民交通出版社出版的《航海学》课本还是估算船位来自百度百科和下文的《航海英语词汇手册》呢?)。
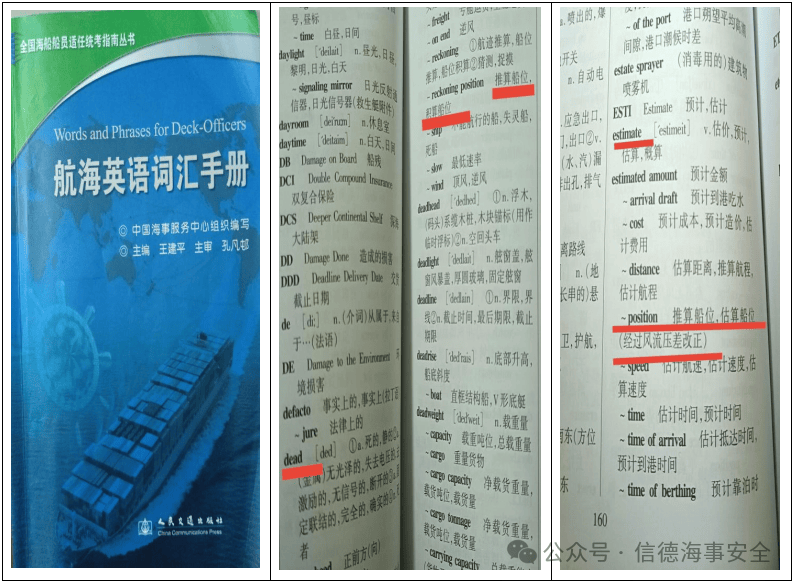
还有来自由2005年北京.人民交通出版社出版, 王建平主编的 航海英语词汇手册中关于这两个概念的翻译:dead reckoning position 推算船位,积算船位 // estimated position 推算船位,估算船位(经过风流压差改正)看下图:
上面说了这么多就为了两件事:
1】纠正一个我认为小的翻译问题,《航海学》课本上关于EP(estimated position) 翻译成 推算船位不如翻译成 估算船位更恰当。
2】 说明DR是不考虑风流影响的积算船位,EP是考虑风流影响的估算船位。
大家都知道已知航向、航速、风和流求航迹和船位,主要分为4种情况:1.无风流影响DR 2.有风无流影响 3.有流无风影响电子海图DR以及最后的 4.有风有流影响EP。其中2有风无流影响由于上文未提及到故不在讨论范围。
实操案列:
我们在做航次计划时涉及到大洋航行,其定位方式一栏通常会写GPS/测天定位或者DR。测天定位由于受天气及测者水平限制一般不用,而DR较之测天定位则更方便且简单。故成为现在很多驾驶员常用的一种辅助定位方式(以GPS为主)。
在纸版海图已经成为过去式的时代下,如何在ECDIS上做出相关定位方式以保证定位的有效性,成为了摆在我们面前新的课题。以下是本人在实际工作中的遇到的一些做法,写下来供各位同仁及领导审阅:
案例一:
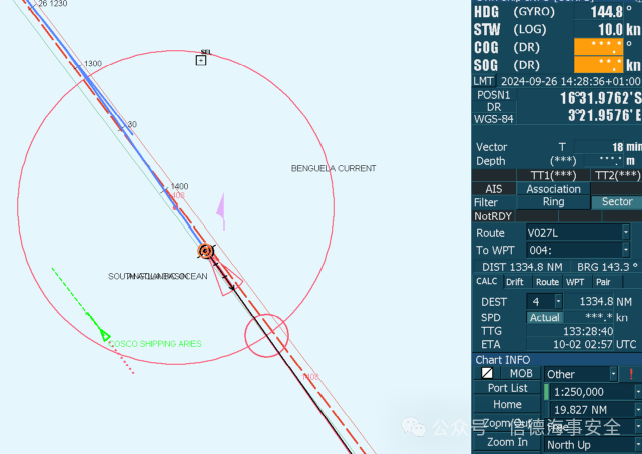
选择某一时间点记录下当时船位及SOG和COG,打开ECDIS的传感器选择窗口,把首向由Heading改为MAN,把STW也改为MAN,然后分别输入提前记录下来的COG和SOG,最后把主定位方式POSN(Main)由GPS1改为DR。见下图
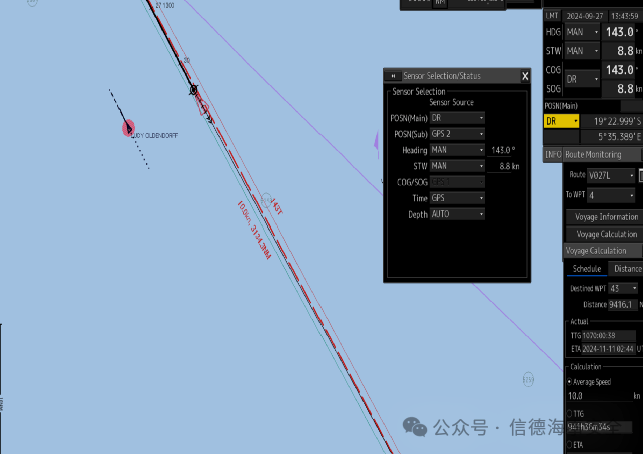
此种方式以考虑完风流压差修正后的航向和航速进行推算所求得的船位,实则是EP(估算船位),但ECDIS则将其记录为DR。因为定位方式上并没有EP的选项,这就造成了所选定位方式(DR)与实际为估算船位(EP)相悖的局面。这样可不好,是否可以在航海日志上做EP的实际记录用来纠正这一缺陷呢?欢迎留言讨论。
案例二:
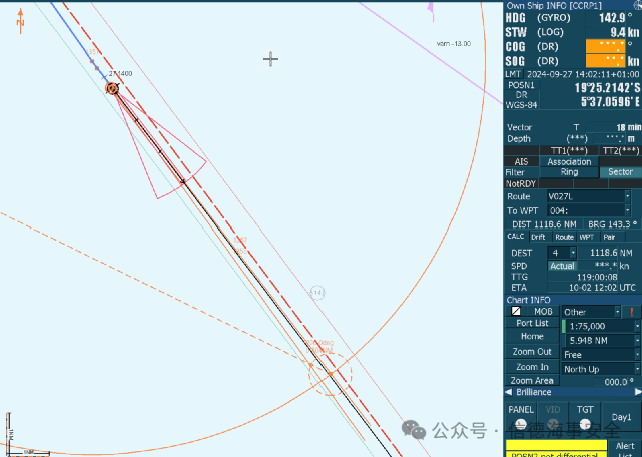
选择某一时间点记录下当时船位,然后直接点击DR模式,此时ECDIS上显示计程仪对水速度STW以及船首向HDG来自电罗经,以当时船位为起点画出真航向线,再以当时航速乘以航时为推算航程截得的点,则为积算船位( DR)。见下图:
此方式为不考虑风流影响所求得的DR船位,但是又与ECDIS所给的需要考虑流的影响的DR有出入。如果流速较小其推算位置准确性还满足要求,如果流速较大则且其推算船位的准确性就会相差很大。这种方式还是不够理想。
案例三:
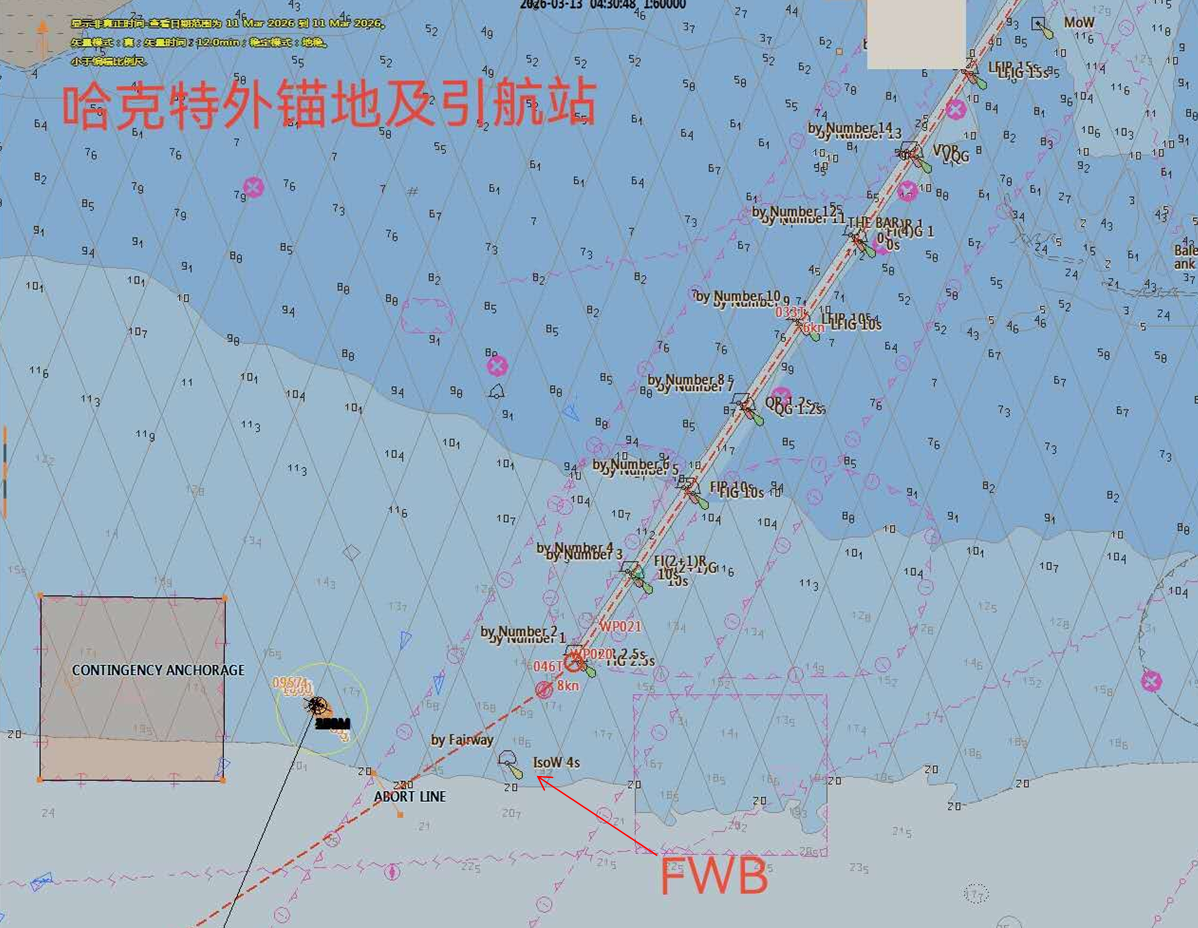
在案例二的基础上记录当时的流向及流速,此时船舶将同时受到两个力的作用:一个力使船舶沿着真航向,以相对于水的计程仪航速VL 前进,另一个力则使船沿着水流流向,以流速VC漂移。因此,船舶是沿着这两个力的合力方向,以推算航速航行的。见下图:
由推算起点画出真航向线,沿真航向线(以当时航速乘以航时为航程)截取计程仪航程得积算点;从积算点画水流矢量,截流程,得推算终点。连接起点与终点的矢量,即为推算航迹向和推算航程,以起点为圆心以推算航速为半径,在推算航迹线上截取的点即为电子海图的DR。
此方式需要在积算点画水流矢量三角形(图中296°/0.5nm来自于当时的流向流速图,见后面流向流速图1),在纸版海图容易操作在电子海图操作有点小困难。见下图:

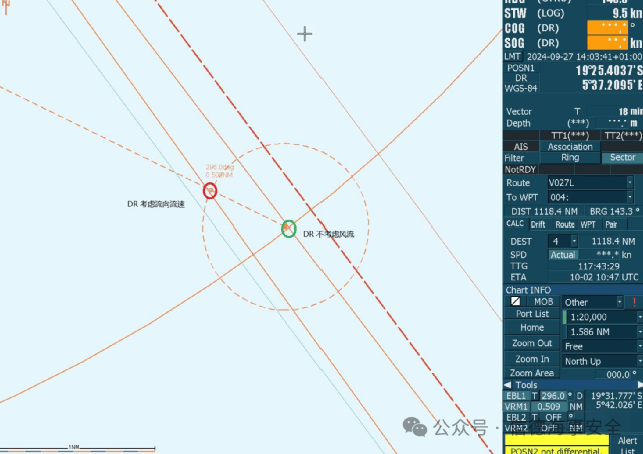
(如果只是打开电子海图的DR推算,推算结束时,其推算位置应在绿色位置,当考虑流向流速影响后,推算结束时,其推算位置应在红色位置,流速越大对其推算位置的准确性影响越大,如遇到下图 的情况,那推算结果将毫无意义。)


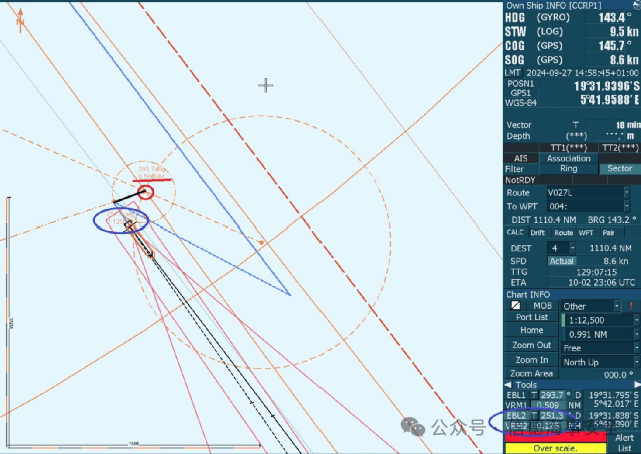
对比上下两张图可以看出:1.当结束DR模式时,实际船位与考虑流向流速的推算船位(黑线/红圈/蓝色椭圆)其差值在0.125nm。2.如不考虑流向流速则其差值在(黑线/绿圈/黄色椭圆)0.798nm。

为什么有差值?且其差值相差较大呢?接下来将讨论推算船位的精度问题。
位置精度:
由于罗经差、计程仪改正率、风流压差,读数误差、操舵不稳和海图作业等防面的误差会导致航迹推算产生误差从而导致最后的推算船位也产生误差,而航迹推算精度主要取决于航迹推算中航向与航程的精度。
影响其推算中航向和航程的各种标准差可参考由郭禹主编的1996年北京.人民交通出版社出版的《航海学》第二篇第一章第三节“航迹推算的精度”一文。
下面说几个结论:
1.无风流航迹推算船位误差圆半径约等于推算航程的2%。
2.有风无流的条件下,航迹推算船位误差圆半径约等于推算航程的3%。
3.有流无风的条件下,推算船位误差圆半径约等于推算航程的4%-7%。
4.有风有流的条件下,推算船位误差圆半径约等于推算航程的5%-8%。
通过以上分析可知;准确及时地测定罗经差,准确地测定计程仪改正率,准确掌握风流对船舶航行的影响及正规的海图作业都是提高航迹推算精度的有效措施。从定量计算中还可知道:风流,尤其是水流对船舶航行的影响是诸多因素中最大的见下图:图1为进行航迹推算时的起点风流情况,图2当流速较大时:供参阅

认识总结:
正常进行DR积算船位的推算并不需要考虑风流影响,而由于在使用电子海图进行DR推算时需要在其LOGBOOK有记录。
如果按照说明书的解释,电子海图本身的DR是需要考虑流向和流速对推算船位的影响的(实际却没有考虑)。故需要在积算点画水流矢量三角形以辅助推算从而对船位有个预判。以免在受流影响大的地方进行DR推算时,因没考虑到流的影响盲目使用电子海图的DR功能而把船置于不利地位。
至于推算船位的误差则受到多种因素的影响,需要在实际工作中勤加观察和练习以尽量减小误差。
从纸版海图到电子海图的演变是航海技术的进步,但同时对驾驶员如何在电子海图上进行海图作业也提出了更高的要求。提出以上几种DR方式也只是在抛砖引玉,由于本人水平有限,难免文章中会有错误和不足之处,还请各位同仁及领导予以批评指正,不吝赐教。