突然发现,大家居然把后台当成许愿池啦!真把小编当哆啦 A 梦使唤呢~既然如此,宠粉到底!
前几天有小伙伴在后台留言,想看关于Arr Rad和Turn Rad的干货文章,这就安排上!
咱们还是老规矩,先从基础定义讲起 ——
Arr Rad(Arrival Radius):
到达半径,指船舶在接近目的地、转向点或特定位置(如锚地、港口入口)时,开始调整航向或减速的预定圆形区域范围。用于航行计划中,帮助船舶平滑过渡到最终进港或靠泊阶段,避免急转弯或突然机动。
在电子海图(ECDIS)或航线规划软件中,Arr Rad可能以虚拟圆圈形式标记,提示驾驶员提前准备。通常跟通常做法和公司规定有关。
Turn Rad(Turning Radius):
即转弯半径(即图中R),指船舶在转向时,其CCRP所划出的圆形轨迹的半径。它反映了船舶在不同航速和舵角下的转向能力。在ECDIS的航次计划中,Turn Rad的值通常与船舶的船速、舵角以及船舶的类型等因素相关。
影响因素:
船舶类型(如集装箱船比油轮转弯半径更小)。
船速(低速时转弯半径通常更小)。
舵角与舵效(满舵时转弯半径最小)。
在制定航次计划时,需要根据船舶的实际情况和航线要求,合理设置Turn Rad的值,以确保船舶在转向过程中能够安全、顺利地完成航线的转换。
WOL/WOP(Wheel-Over Line/Point):
WOL是船舶开始转向的预定位置线,通常以虚拟线形式标记在电子海图(ECDIS)或航行计划中。WOP是WOL上的具体转向起始点,驾驶员需在此点下达舵令以启动转向。
其实Arr Rad 和Turn Rad也是现代电子海图的产物,在纸板海图航线设计中,只有WOL的绘画及计算。
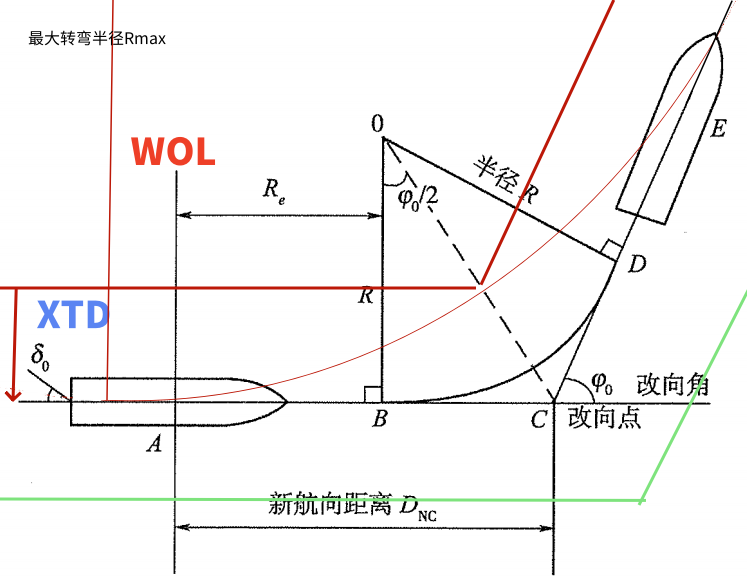
我们都知道,当船舶转向时,往一舷操一个转舵角δ0后,会由于惯性,保持原航向航行一段时间,然后才开始围绕某一点旋转至新航向。
直线航行即滞距Re,旋转半径即为R(Turn Rad),最大的旋转半径就是旋转圈接触到XTD,超过这个半径就会出XTC,因此在这条线以下我们都是可以接受。我们将旋回圈与航线相切的点设为B,那么根据图片得知,
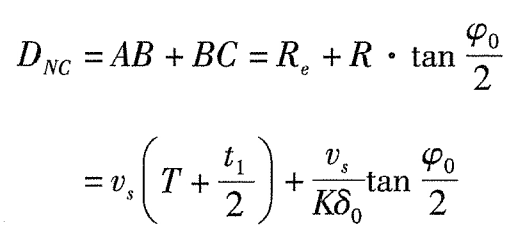
WOL即为Dnc(Distance to New Course)=GB(Re)+BC
Vs是船速
t1是转舵延时,通常在操舵系统的说明书上或者根据实际测量,或者根据经验数据也是可以确定的。
δ0是舵角
φ0是改向角
根据计算公式,还需要引入另外两个概念
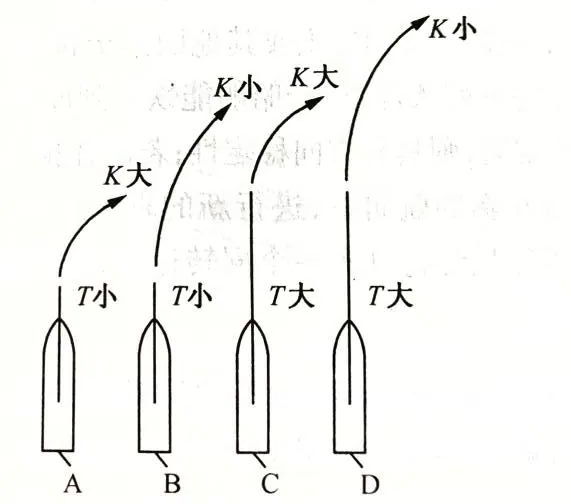
K 旋回性指数
T 追随性指数
通过下方照片感受一下,K T数值带来的变化。
是不是看见这个公式就已经蒙了,先不说会不会算,就算是会,没个转向点这么计算一下也会花很多时间。并且涉及到K、T、t1等数值计算,相当麻烦。
在航海实践操作中,AB段可以近似以该速度和装载状态船舶滞距Re来替代(但是两者的概念不同),一般取1-2倍船长。
速度越大,排水量越大,操舵时间越长则Re越大。具体选取多少倍船长可以根据当时的船舶速度和装载状态(排水量)等来定。VLCC或VLOC一般取2L。
至于BC段,K指数可以近似计算,误差应该不大。也就是说,K指数可以用定常旋回角速度ROT与舵角δ0的比值来计算,即:K=ROT/δ0
船舶定常旋回时角速度是不变的,舵角又是一个确定的数,那么,船舶这个状态之下的K就计算出来了。
同样我们也可以反向推出,R=Vs/Kδ0=Vs/ROT
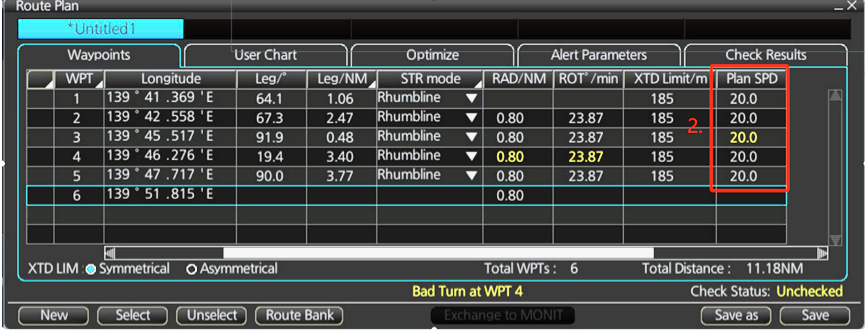
在5W吨及以上的货船上要求安装ROT(Rate of Turn,即转舵速率),那么旋转半径R就可以在航次计划时,根据计划速度及计划ROT计算出来,应用于电子海图航线绘画上。
也就是说,根据船速在转向时,将ROT读数控制在计划数值上,就会得到想要的旋转半径。
WOL=(1~2)L/1852+(Vs/ROT)*tan(φ0/2)
例如:某VLCC船长300m,某次转向60°,计划速度Vs为10.0kts,r0为10°/min,那么,
WOL=2*300/1852+10/10 * tan(60/2)=0.9nm
在实际计算中,很多时候习惯人为的根据经验设定旋转半径为0.5-2.0。
WOL=(1~2)L/1852+(0.5~2)*tan(φ0/2)
速度越快,舵角越小,转舵速率越小,半径R的取值越大。
油轮方面
油轮检查SIRE2.0(VIQ) 要求
WOL=Re+½(V/60)*(δ0/ROT)
同样是上述举例:某VLCC船长300m,某次转向60°,计划速度Vs为10.0kts,r0为10°/min
2*300/1852+(10/60)*(60/10)/2=0.82nm½