某轮某航次静态吃水10.2米,在某受限水域以11节船速航行时计算下沉量为1.96米。
再按公司富余水深政策,计算安全水深为12.02米(计算过程参见图1)。
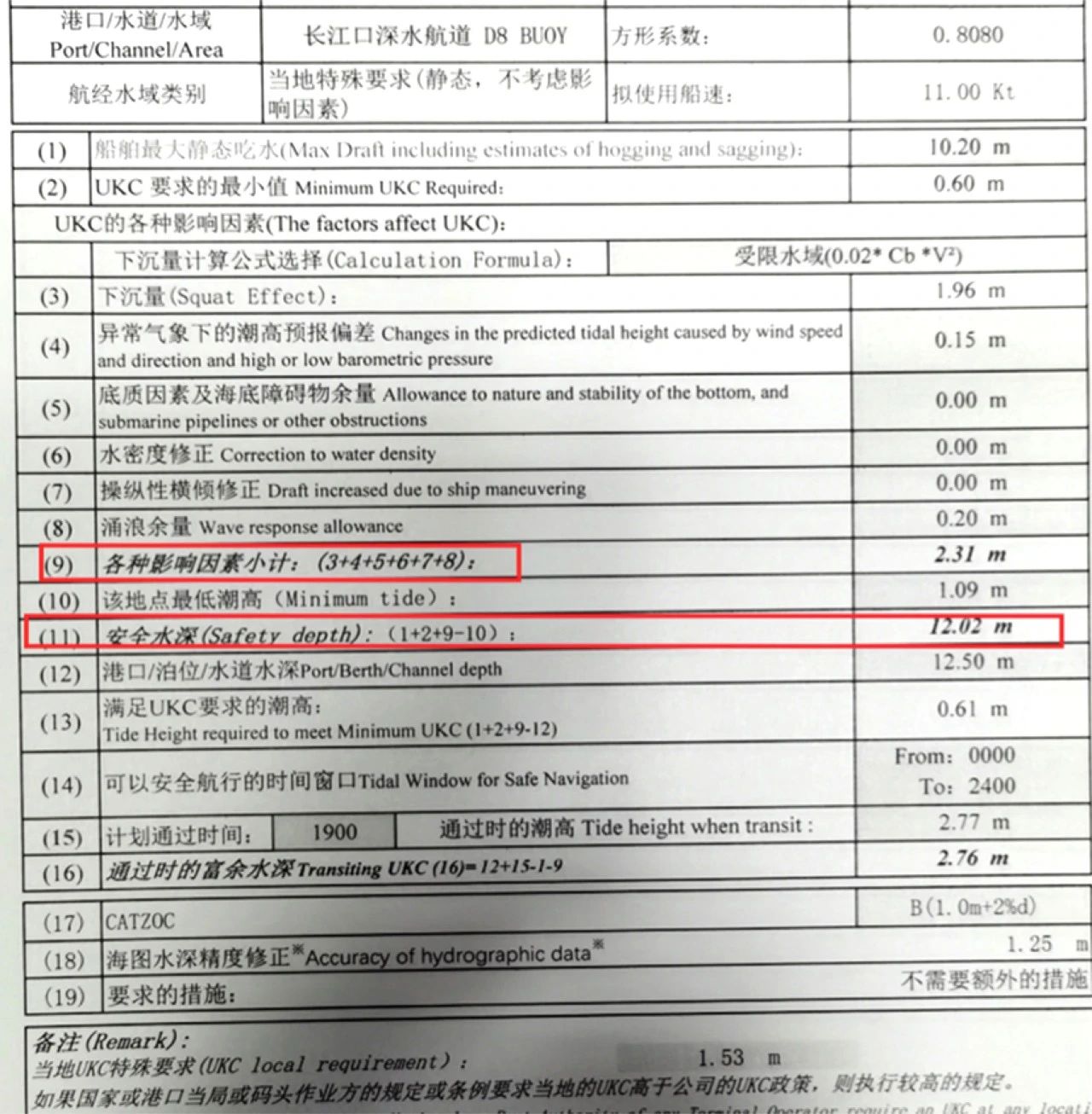
图1
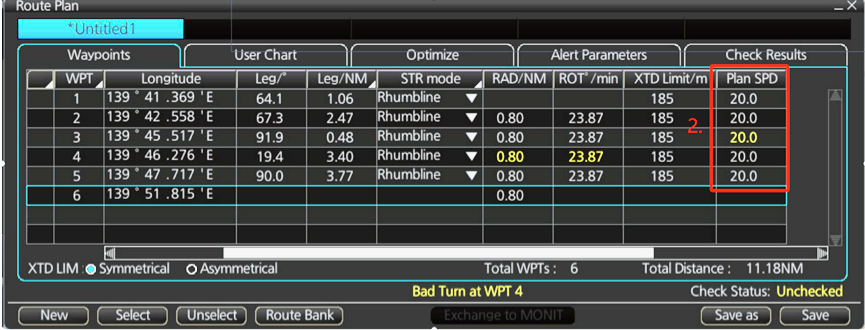
该轮配置的电子海图是FURUNO(古野)FMD-3300,外部检查人员在验证航线检测功能(Route Check)时,发现某些超过安全水深12.02的水深点(12.9米,13.0米,13.2米等)也出现了高亮显示(含义为这几个水深也应示警),见图2。那么为何会出现如此不合常理的现象(该问题的答疑见第五部分)?
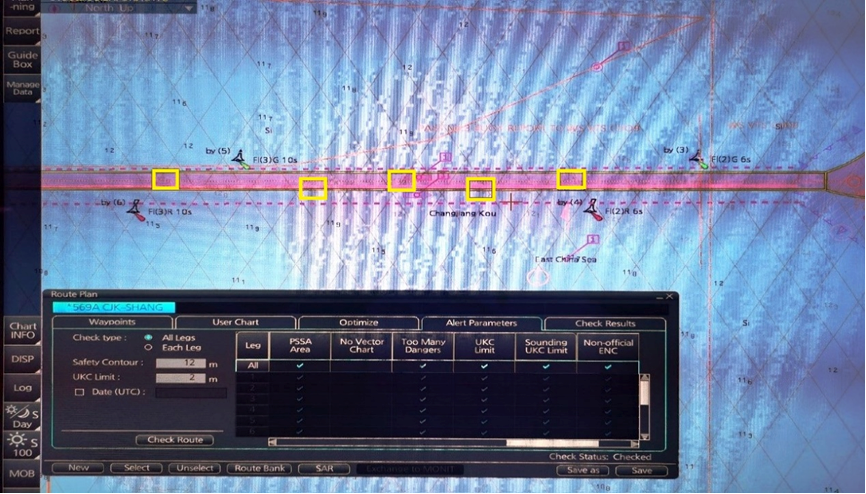
图2
需要说明的是:上述高亮(凸显)问题,在JRC电子海图上操作时只需将等于12米的水深点手动绘制出来,然后人为划分为可航水域与不可航水域,并在可航水域内水深点≤12米的水深点凸显出来,在进行航线检测时就不会出现上述现象。
但同样设置下,古野电子海图上却出现了,这就有必要先了解一下古野电子海图中有关航线安全设置和检测等问题。
一、航线设计时UKC LIMIT设置和Route Check时航线安全边界(XTD)内水深点产生高亮和警告
重要提示1:“三要素”
“UKC Limit ”警报的评估标准并非仅基于航线安全边界内的龙骨到海底的静态深度(UTC),而是以下列三个参数为计算基础的动态值:
(1)计划航线上设置的吃水(此模式只能设置整数);
(2)ECDIS系统自动计算的下沉量(与计划航行速度有关,古野设备的具体计算公式未知);
(3)人工设置的UKC Limit(UKC限值,数值在0-99米之间),含义为驾驶人员在航线设计时,根据不同航区按体系要求而人为设置的一个UKC值(在设备中它以Alert Parameters表示——即报警参数)。
重要提示2:“动态基准值”
上述三项合计的值(静态吃水+ECDIS根据速度计算出的下沉量+人为设置的UKC Limit),在本文中我们将其假定为“动态基准值”。
★不论该船是否配备了ECDIS,它都是船舶在所有航段所必须采用的安全基准,只不过有ECDIS的船舶,使用的是电子化自动计算,无ECDIS的船舶则需要预先人工计算。
在进行Route Check时,“动态基准值”和航线安全边界内水深点或者有水深数值处进行对比,如果“动态基准值”小于海图水深,那么这些水深点就会高亮凸显出来,并在航线检查结果中显示出Sounding UKC Limit报警。
图3和图4是计算和显示的实例(下图只为示例解读,数值与本文案例无关)

图3

图4
针对这个情况,船长和驾驶员应如何应对?
1、观察航线上水深数值,核查高亮凸显的最高水深点与没有高亮凸显的最低水深点的值,就可以推导出ECDIS计算的下沉量,并和公司下沉量计算公式得出的值做对比,看看是否有较大出入。
曾有一条高速客轮,因其计划航行速度很快,在ECDIS上计算出的下沉量就非常大,导致航线上很多水深点报警。实际上该客轮高速航行时候船体呈上浮状态,其动态吃水比静态吃水反而要小,也即该船ECDIS算出的下沉量与实际情况并不相符。
对于大部分普通船型来说,ECDIS计算的下沉量比较切合实际,但在此还是提醒读者,必要时应核实一下以做到心中有数。
2、驾驶员在进行UKC limit值设置时,要清楚ECDIS已经自动计及了下沉量,在设置UKC limit的时候不能直接根据公司富裕水深政策再加下沉量,如果使用,意味着在系统上使用了两次下沉量,看上去似乎是更安全了,但这反映出操作者存在着概念性错误,以及船舶的可航水域范围也就变小了。
3、那么能否将UKC LIMIT设置为0米呢?如果将UKC LIMIT设置为0米,假设吃水9米,ECDIS根据计划航速计算的下沉量为1米,如果海图水深点浅于10米的话,船将会直接触底,显然这样的设置是不允许的。
总之,我们要合理设置参数以保障航线安全,同时在应对检查时也不至于被检查官问懵。检查官不一定熟悉船上的ECDIS,但是他们提出的问题我们应能进行合理的解释。
二、航行监控时UKC设置和航线安全边界内水深点报警和高亮
该部分内容及三、四部分的图文解说,旨在让使用该ECDIS的操作人员熟悉和了解相关要领,举例的数值与本文案例无关。
航行监控时,航线安全边界内水深点高亮突显的影响也同样地与“三要素”有关。

要素(1)吃水和要素(3)UKC limit见下图右下角Overlay/NAV Tool-UKC工具栏里面设置;要素(2)下沉量(根据监控航线的计划速度计算)。
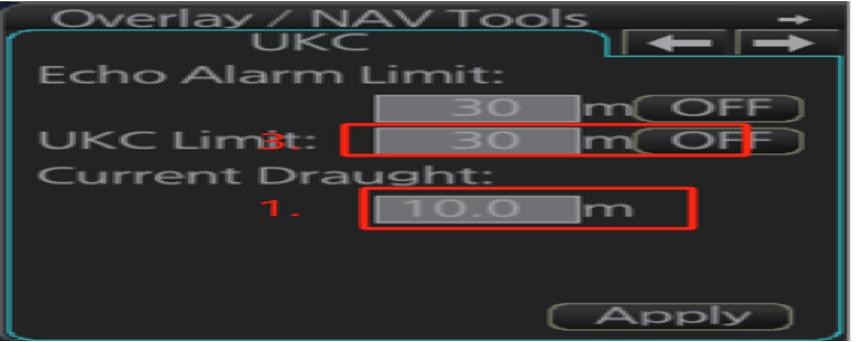
对船长和驾驶员的特别提示:ECDIS已经计及了下沉量。
三、航行中,UKC的设置和Look Ahead探测海图区域水深点报警和高亮
航行中,Look Ahead探测海图区域水深点报警和高亮影响要素一样是“三要素”

要素中的(1)吃水和(3)UKC limit见下图右下角的工具栏Overlay/NAV Tool-UKC里面的设置;要素(2)下沉量是根据船舶当前实际对地速度计算的(注:该型号只能用SOG,其它型号可能可以用计程仪速度输入)。
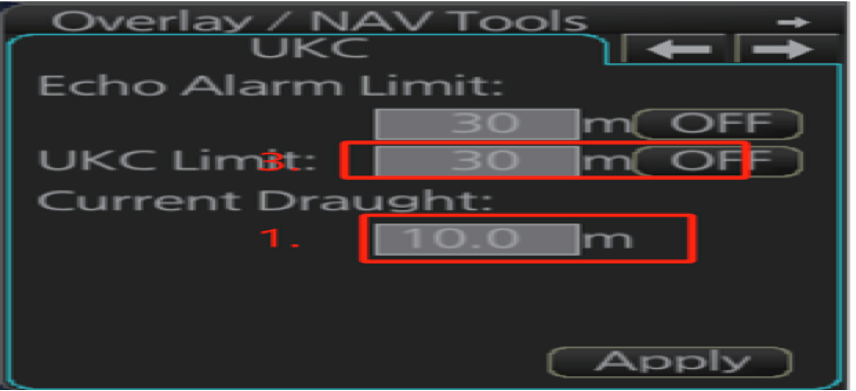

对船长和驾驶员的特别提示:ECDIS已经计及了下沉量。
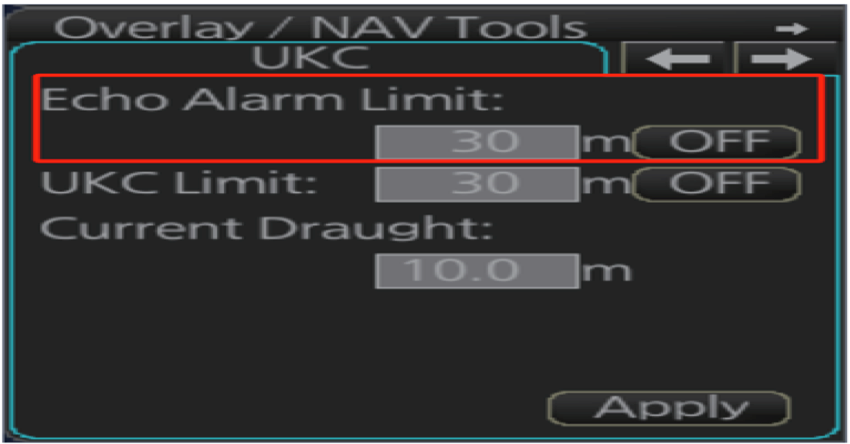
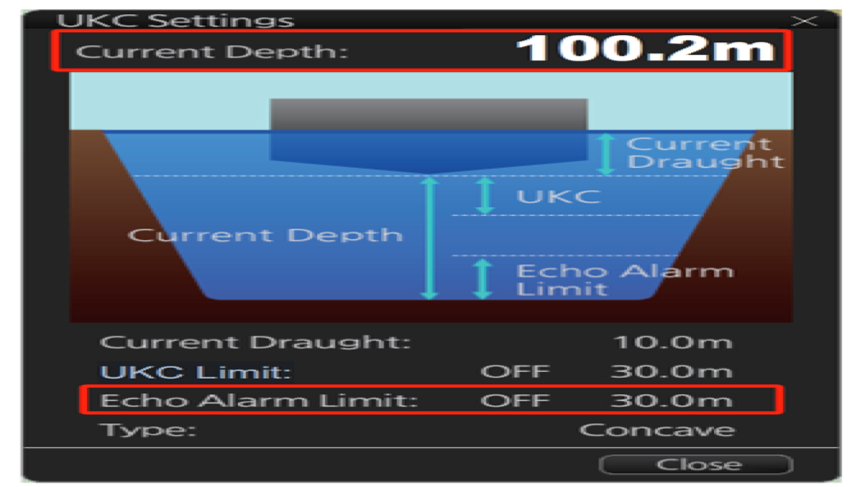
四、航行中,Echo alarm limit设置和报警
Echo alarm limit警报是只跟测深仪探头测出到海底实际距离对比。与设置的吃水,以及速度都没有关联。
测深仪测出的水深浅于设置的Echo alarm limit值就报警,产生的报警是最高级别的Alarm报警,报警名称是“Depth Limit”。
如果测深仪测出的水深小于UKC Limit设置的值,也会产生“Actual UKC Limit”报警。报警级别是Warning。

经验和体会
工具栏Overlay/NAV Tool-UKC里UKC Limit这个值的设置影响三个报警:
1、测深仪水深小于UKC LIMIT设置的值,会产生“Actual UKC Limit”报警。
2、对比look ahead区域的海图水深,如果look ahead区域水深点小于“动态基准值”:吃水(当前吃水)+下沉量(与当前速度相关联的)+UKC limit,就会产生报警及高亮突出显示。
3、航行监控时,影响航线安全边界内水深点高亮突出显示。如果航线安全边界水深点小于“动态基准值”时,系统就会高亮突出显示。
五、安全水深,安全等深线设置和报警
安全水深和安全等深线的设置会影响海图显示,设置安全等深线后会分颜色来区分安全等深线安全和危险水域。设置安全水深后会分深色黑体字和浅色字体来区分安全和危险的水深点。
当船舶经过或者Look ahead区域触及到海图上显示的安全等深线就会触发“crossing safety Contour”报警。但是Look ahead区域的海图水深点报警与这边的安全水深设置是没有关联的,只与前面说到的三个要素有关:即:Overlay/NAV Tool-UKC里面(1)吃水,(2)下沉量(根据实际的对地速度计算的),和(3)UKC limit。

由此可见,UKC LIMIT值可设置为1.0米-,在进行航线检测时,每段航路高亮显示的水深与船舶吃水、UKC LIMIT的设置以及航速有关。就上述例子中船舶计算安全水深为12米(实际上应为12.02米),航速11节对应的下沉量约为2.0米,UKC LIMIT设置值为2米与公司UKC政策不相符,如果设置为1米更接近公司UKC政策,因此,其安全等深线应为20米,而该航段用以计算水深的“动态基准值”为13.2米,大于电子海图显示的水深,因此,XTD内包括边界上小于13.2米的水深点都会高亮显示。
那么如何解决高亮凸显问题呢?
第一,调整转向点避开这些高亮显示水深点;
第二,降低船舶航速来减少船舶下沉量;
第三,将UKC LIMIT的值调整到满足公司UKC政策的值。
内容小结
Sounding UKC limit测探/探测UKC限制: Chart depth for one or more legs is outside the UKC threshold.一段或多段的海图水深超出UKC的临界值。
“Actual UKC Limit”(实际UKC限制)警报的评估标准只是测深仪探头测出到海底实际距离和回声警报(echo alarm limit)设置的数值这两个数值的对比。产生的报警是“Depth Limit”和“Actual UKC Limit”。
当设定了一个前瞻区域,而设定区域内的海图水深比“动态基准值”更浅时,就会生成“UKC Limit”警报。此外,如果实际富余水深(测深仪实际探测龙骨到海底水深值)比设置的Echo Alarm limit浅时,则会发出“Actual UKC Limit”警报。
为方便读者深化理解,附件视频资料由NAVTOR电子海图图书供应商工程师龙杰提供。
以下视频来源于
电子海图
本文特别感谢龙杰工程师、古野上海服务部经理孙金和以及远福洋二副常慧聪、盛池实习大副赵海宏、兴池二副周成富鼎力协助。
另外,本文对该系统的操作使用介绍内容,仍然可能是不全面的或者有不正确的地方,古野设备也可能会随时更新相关软硬件的设置,为此希望读者提出宝贵意见,以便我们后续做进一步修订,为的是航行更安全。
✦ 术语(仅作为本文相关术语的专属定义)
1、静态吃水——平静水面中,船舶处于静止状态下计及中拱或中垂后测得的吃水值。
2、动态吃水——航行状态下,船舶在某航速下计算出对应的下沉量+静态吃水。
3、XTD(Cross-track Distance)——其本意为实际船位和计划航线之间的横向偏移量值;用于导航功能时,它通常也和(XTD-Limit——船位偏离计划航线的最大许可值)通用,单位为“分”或米。
4、UKC——龙骨下的富余水深值。
专家审稿:方玉林船长