浅析极度受限条件下船舶掉头操纵
船长 高茂辉
受限条件下,船舶掉头操作是一项极其复杂的操纵作业,首先,该项操作会受到自身客观条件的制约,包括:舵效、旋转性能、设备配置(例如有无侧推)等;同时也会受到来之外界多种因素的影响,包括:风向风速、流向流速、旋转空间的大小、是否有拖轮协助、指挥人员水平等。
我们借助一个实际案例,分析一下船舶在极度受限条件下,掉头操纵的过程。船舶基本信息:船长200米, 船宽28米,吃水Df=6.2m,Da=8.9m,右旋固定螺距螺旋桨,有首侧推(有效功率700KW),船头双锚。掉头水域环境信息:天气晴朗,阵风5级,西北偏北风(偏顶风,左前来风),流速0.8节,流向偏南(顶流),调头区域西侧有一艘靠泊油船,船长160米,调头区水深9-10米,有效掉头旋转半径大约255米,掉头区域东北角有一突起(注意监控,需格外关注),拖轮两艘。

图一 距离调头区域2海里位置

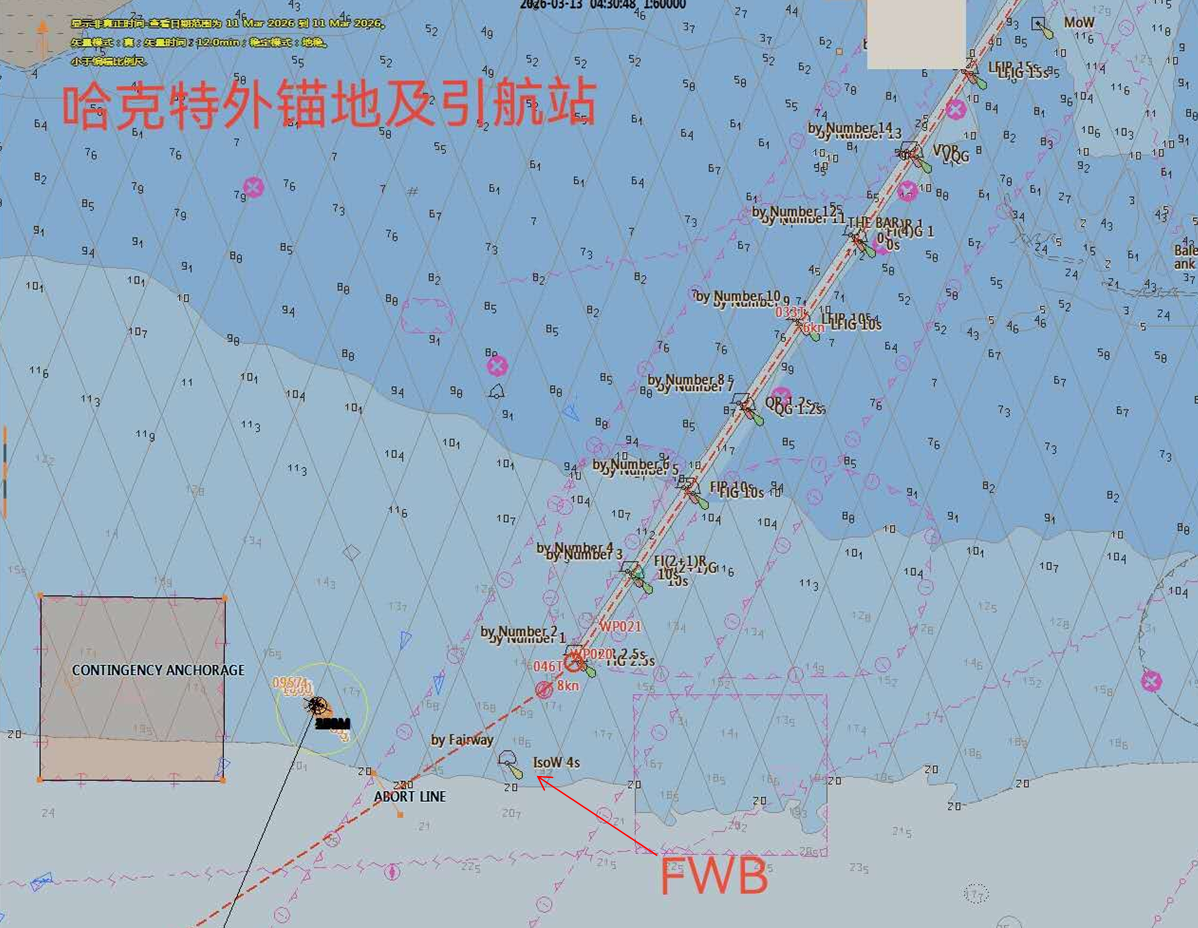
图二 抵达调头区域前后位置
根据上述情况,综合考量,如船舶选择在调头区域向右旋转掉头(风、流有利),但掉头区域西侧的靠泊油船(正在作业,需格外关注),对船舶掉头操纵不利,最终决定在掉头区域稍前位置开始。那么,如何在极低船速(旋转空间极度受限)情况下控制、稳定航向也就成了重中之重,只有在抵达开始掉头区域前后,将船体摆正在预定位置,才能确保顺利、安全完成掉头作业。所以,采取了船头双拖轮护航的模式,如图一所示,在距离掉头区域2海里时,在主甲板船头左前、右前带好拖轮,控制航向。当船舶到达预定掉头区域前后(保持微微向前,使tug2抵达船尾过程中,足抵消期间风流的影响),甲板人员要快速将tug2解离,tug1不解缆,tug2快速到达大船右后位置(自由机动),如图二所示,至此完成了船舶旋转掉头操作前的准备工作。

图三 开始掉头

图四 掉头过程
开始掉头操纵,如图三所示,同时,对于船舶前后有效旋转距离(即船舶到前后障碍的有效距离),保持驾驶员不间断监控和报告,图四为掉头过程(说明:如果tug2在尾部带缆,对掉头效果会更好,但由于距离左后靠泊油船空间偏小,难以安全旋转)。船舶掉头作业是一项复杂性强、综合性广的操纵过程,在掉头操作的过程前期、中、后期,大量准备工作和准备要完成,例如:制定科学的应急预案,作业的碰头会议(很多情况都是在对讲机里传达,确保前后人员准确知晓操作流程),双锚设定应急位置,解缆、带缆现场人员安全作业管理,船间效应和岸壁效应(此例影响不大),船舶受到的风至偏转效应影响,水文气象的特殊影响(如水流至船体漂流),过往船舶影响等,都要需要操作指挥人员仔细考量和研判的,并根据整个操作过程的实际情况,对作业操作细节实时做出优化调整。

图五 实际掉头操作轨迹